frestimate
Simulink モデルの周波数応答の推定
構文
説明
[___] = frestimate(___, は、追加のオプションを使用して周波数応答を計算します。この構文は、前記すべての入力引数と出力引数の組み合わせで使用できます。options)
sysest = frestimate(data,freqs,units)
例
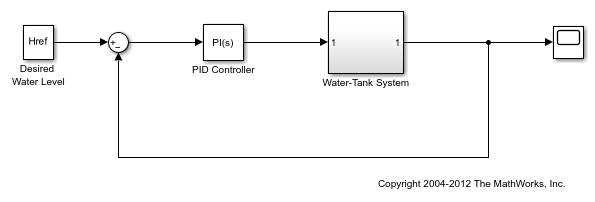
watertank モデルでプラントの開ループ応答を推定します。モデルを開きます。
model = 'watertank';
open_system(model)

プラントの開ループ応答を推定するには、解析ポイントでモデルのこの部分を指定する線形化 I/O セットを定義します。コントローラー出力で入力解析ポイントを定義し、プラント出力で開ループの出力ポイントを定義します。
io(1)=linio('watertank/PID Controller',1,'input'); io(2)=linio('watertank/Water-Tank System',1,'openoutput');
推定のための定常状態の操作点を見つけます。この例では、モデルの初期条件から派生する定常状態の操作点を使用します。
watertank_spec = operspec(model); opOpts = findopOptions('DisplayReport','off'); op = findop(model,watertank_spec,opOpts);
入力信号を作成して推定します。この例では、指定した周波数で一連の正弦波摂動を個別に送信する sinestream 信号を使用します。
input = frest.Sinestream('Frequency',logspace(-3,2,30));
モデルの指定部分の周波数応答を推定します。結果は、sinestream 信号に指定された各周波数での応答を含む周波数応答モデルです。
sysest = frestimate(model,op,io,input); size(sysest)
FRD model with 1 outputs, 1 inputs, and 30 frequency points.
測定された周波数応答を調べます。
bode(sysest,'*')

Simulink モデルを線形化し、周波数応答の推定を使って正確な線形化の結果を検証します。
watertank モデルを開きます。
model = 'watertank';
open_system(model);
プラントの開ループ応答の線形化を取得します。そのためには線形化 I/O ポイントを定義し、モデルの初期条件近傍の定常状態操作点を見つけます。その後、モデルを線形化します。
io(1)=linio('watertank/PID Controller',1,'input'); io(2)=linio('watertank/Water-Tank System',1,'openoutput'); watertank_spec = operspec(model); opOpts = findopOptions('DisplayReport','off'); op = findop(model,watertank_spec,opOpts); syslin = linearize(model,op,io);
線形化をチェックするには、同じ解析ポイントと操作点を使用して周波数応答を推定します。この例では、推定に sinestream 入力信号を使用します。
input = frest.Sinestream('Frequency',logspace(-3,2,20));
sysest = frestimate(model,op,io,input);
ボード線図を使用して、周波数領域における正確な線形化と推定された応答を比較します。
bode(syslin,'b-',sysest,'r*') legend('Exact linearization','Estimation')

シミュレーション結果のビューアーでは、周波数応答の推定結果を周波数ごとに調べることができます。ビューアーを開くには frest.simView コマンドを使用します。そのためには、frestimate の simout 出力引数を使ってシミュレーション データを保存します。
watertank モデルでプラントの開ループ応答を推定します。最初にモデルを開きます。
model = 'watertank';
open_system(model)

プラントを指定する線形化 I/O セットを定義し、推定のための定常状態の操作点を見つけます。
io(1)=linio('watertank/PID Controller',1,'input'); io(2)=linio('watertank/Water-Tank System',1,'openoutput'); watertank_spec = operspec(model); opOpts = findopOptions('DisplayReport','off'); op = findop(model,watertank_spec,opOpts);
その後、推定のための入力信号を作成し、モデルの指定部分の周波数応答を推定します。simout 出力引数を使用して推定データを保存します。
input = frest.Sinestream('Frequency',logspace(-3,2,10));
[sysest,simout] = frestimate(model,op,io,input);
シミュレーション結果のビューアーを開きます。
frest.simView(simout,input,sysest)

ビューアーには、その [ボード線図] セクションで選択した範囲内にあるすべての周波数について、定常状態の時間応答とその応答の FFT が表示されます。これらのプロットは、応答がその想定された応答からいつ逸脱するかを特定するために役立ちます。シミュレーション結果のビューアーの使用の詳細については、推定された周波数応答の解析を参照してください。
推定対象としているシステムの線形モデルがある場合は、ビューアーでの比較に用いるベースライン応答としてそのモデルを使用できます。たとえば、正確な線形化によって取得したモデルを、推定された周波数応答と比較することができます。線形化 I/O セットと操作点を使用して、watertank プラントの正確な線形化を計算します。
syslin = linearize(model,io,op);
シミュレーション結果のビューアーを再び開き、今度は入力引数に syslin を指定します。
frest.simView(simout,input,sysest,syslin)

ビューアーの [ボード線図] セクションに、正確な応答 syslin を示す線が含まれています。このビューは、推定された応答が線形化から逸脱する特定の周波数を識別するために役立つことがあります。
入力引数
出力引数
制限
frestimateをモデル参照内で出力解析ポイントを指定して使用する場合、参照モデルの [最上位モデルごとに可能なインスタンスの総数] コンフィギュレーション パラメーターは 1 でなければなりません。
ヒント
多入力多出力 (MIMO) システムの場合、対応する出力信号をシミュレートするために、
frestimateによって各入力チャネルに信号が個別に挿入されます。推定アルゴリズムでは、入力とシミュレーションされた出力を使用して MIMO 周波数応答を計算します。多入力システムの線形化入力ポイントでさまざまな入力信号を挿入する場合は、システムを、複数の独立した単入力システムとして扱ってください。frestimateを使用して、各線形化入力ポイントについて個別の周波数応答推定を実行し、周波数応答の結果を連結します。
アルゴリズム
frestimate は、指定された入力信号 (uest(t)) を入力解析ポイントに挿入します。モデルをシミュレートして、sinestream 入力について次に図示されるように、出力解析ポイントで応答信号 (yest(t)) を収集します。

一般に、frestimate は高速フーリエ変換の出力信号と入力信号の比率を計算することによって周波数応答を推定します。
sinestream 入力信号の場合、関数は、各周波数の信号に指定された整定周期数内に収集されたデータを破棄する (sinestream 入力信号を参照。)sinestream 信号のフィルター処理のオプションがアクティブである場合、関数はバンドパス フィルターを対応する周波数の残りの信号に適用し、さらに 1 周期を破棄して残っている過渡信号をすべて削除します。関数は結果の信号の FFT を使用して Resp を計算します。結果の
frdモデルには sinestream のすべての周波数が含まれます。
チャープ入力信号の場合、関数は比率 Resp において、チャープに指定された周波数範囲外にある周波数をすべて破棄する。結果の
frdモデルはチャープ範囲内に収まるフーリエ変換のすべての周波数を含みます。他の入力信号の場合、結果の
frdはフーリエ変換におけるすべての周波数を含む。
拡張機能
バージョン履歴
R2009b で導入