plot
レーザーまたは LiDAR スキャンの読み取り値の表示
説明
plot( は、入力 scanMsg)LaserScan オブジェクト メッセージで指定したレーザー スキャンの読み取り値をプロットします。座標軸は、レーザー スキャナーでサポートされる最大範囲に適合するよう自動的にスケーリングされます。
メモ
plot は削除されます。代わりに rosPlot を使用してください。詳細については、ROS メッセージ構造体の関数を参照してください。
plot(___,Name,Value) は、1 つ以上の Name,Value 引数のペアによって指定された追加オプションを提供します。
linehandle = plot(___)linehandle を使用します。
ROS レーザー スキャン メッセージをプロットする場合、MATLAB® は軸の向きに対する ROS の標準の規則に従います。この規則は、正の x は前方向、正の y は左方向、正の z は上方向を示しています。詳細については、ROS Wiki の Axis Orientation を参照してください。
例
ROS ネットワークに接続します。レーザー スキャンのトピックをサブスクライブし、メッセージを受信します。
rosinit('192.168.17.129')Initializing global node /matlab_global_node_90279 with NodeURI http://192.168.17.1:50889/
sub = rossubscriber('/scan');
scan = receive(sub);レーザー スキャンをプロットします。
plot(scan)
ROS ネットワークをシャットダウンします。
rosshutdown
Shutting down global node /matlab_global_node_90279 with NodeURI http://192.168.17.1:50889/
ROS ネットワークに接続します。レーザー スキャンのトピックをサブスクライブし、メッセージを受信します。
rosinit('192.168.17.129')Initializing global node /matlab_global_node_31712 with NodeURI http://192.168.17.1:51463/
sub = rossubscriber('/scan');
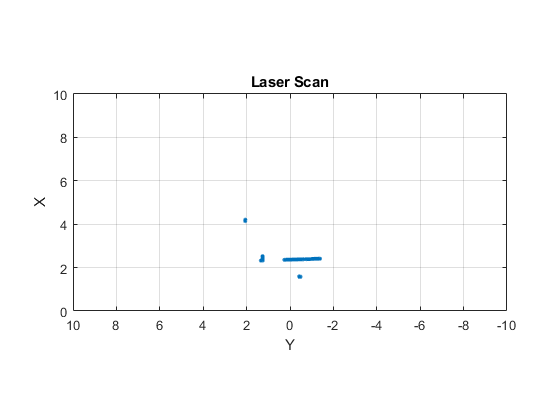
scan = receive(sub);最大範囲を指定してレーザー スキャンをプロットします。
plot(scan,'MaximumRange',6)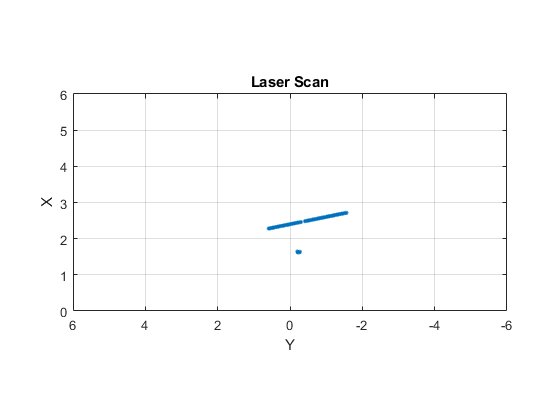
ROS ネットワークをシャットダウンします。
rosshutdown
Shutting down global node /matlab_global_node_31712 with NodeURI http://192.168.17.1:51463/
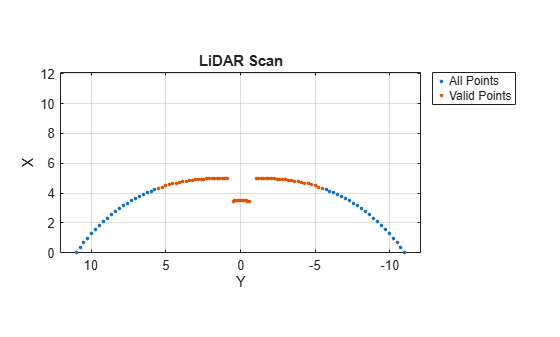
LiDAR データを距離と角度のベクトルとして指定します。これらの値には、センサーの範囲外の読み取り値が含まれます。
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
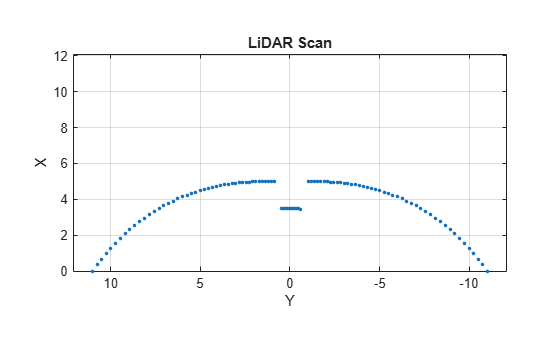
距離と角度を指定することにより、LiDAR スキャンを作成します。LiDAR スキャンのすべての点をプロットします。
scan = lidarScan(ranges,angles); plot(scan)
指定した最小/最大距離に基づいて、無効な点を削除します。
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')