Controlling Robot Motion | Student Competition: Mobile Robotics Training, Part 1
From the series: Student Competition: Mobile Robotics Training
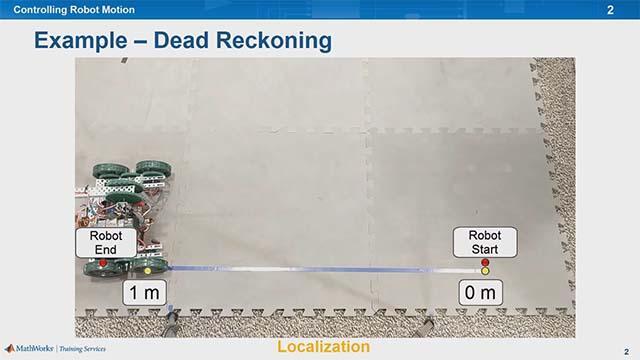
Learn how to control a robot to move on its wheels autonomously using a simple dead reckoning algorithm.
You will start with an introduction to encoder sensors and then learn how to use the distance calculation using encoders to implement the dead reckoning algorithm in Simulink®.
In this video, you will also be introduced to the Mobile Robotics Training library to include simulation behavior and test your algorithm.
Mobile Robotics Training toolbox will be used for the simulation purposes.
A VEX EDR robot is used to demonstrate the performance of the dead reckoning algorithms on the microcontroller.
Additional Resources:
Recorded: 27 Jun 2017
Download Code and Files
Related Products
Learn More












Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します: United States
また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)