このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
計画と制御
ガイダンス モデルとナビゲーション、軌跡とウェイポイントの追従
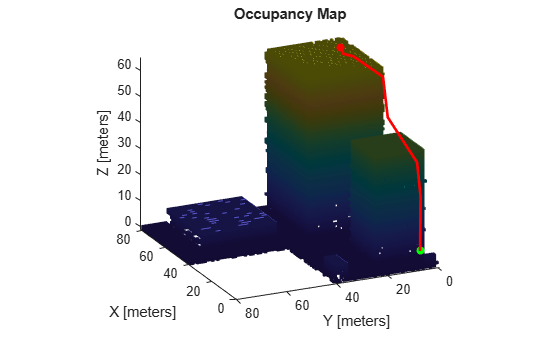
固定翼 UAV およびマルチローター UAV のガイダンス運動モデルを使用して、UAV の飛行を計画し、実行します。ウェイポイントと軌跡の追従アルゴリズムを使用して、事前定義済みの飛行ミッションを実行します。市街地の設定で飛行の計画とシミュレーションを実行する RRT パス プランナーの使用例については、Motion Planning with RRT for Fixed-Wing UAVを参照してください。
関数
ブロック
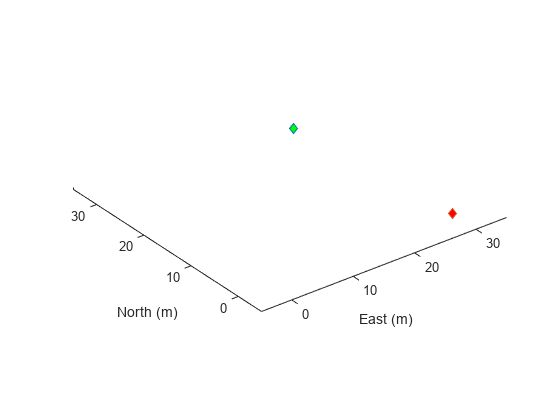
| Orbit Follower | Orbit location of interest using UAV |
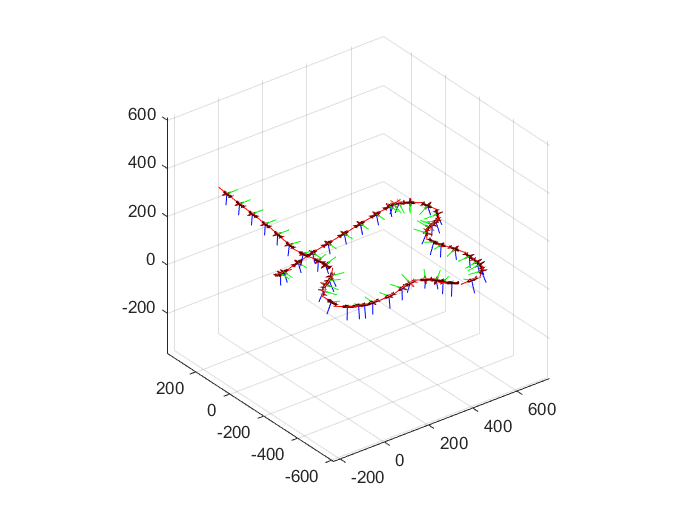
| Waypoint Follower | Follow waypoints for UAV |
| UAV Guidance Model | Reduced-order model for UAV |
| UAV Animation | 並進と回転を使用した UAV 飛行経路のアニメーション |
| Path Manager | Compute and execute a UAV autonomous mission (R2020b 以降) |
| Fixed-Wing UAV Point Mass | Integrate fourth- or sixth-order point mass equations of motion in coordinated flight (R2021a 以降) |
| Obstacle Avoidance | Compute obstacle-free direction using range sensor data and target position (R2021b 以降) |
トピック
VTOL コントローラー テンプレート
- Design and Tune Controller for VTOL UAV
Use the controller templates to set up a vertical takeoff and landing (VTOL) UAV for flight missions.
注目の例














You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)