最小スナップの軌跡の生成
この例では、Minimum Snap Polynomial Trajectory ブロックを使用して最小スナップの軌跡を生成する方法を説明します。
モデル例
モデルを開きます。
open_system("minsnap_traj_ex1.slx")
このモデルには、Minimum Jerk Polynomial Trajectory ブロックの "Waypoints" 端子に 6 個の 2 次元ウェイポイントを指定する Constant ブロック Waypoints と、"TimePoints" 端子にそれらのウェイポイントそれぞれの時間点を指定する別の Constant ブロックが含まれています。"Time" 端子への入力は、時間の進行をシミュレーションするためのランプ信号です。
シミュレーションと結果の表示
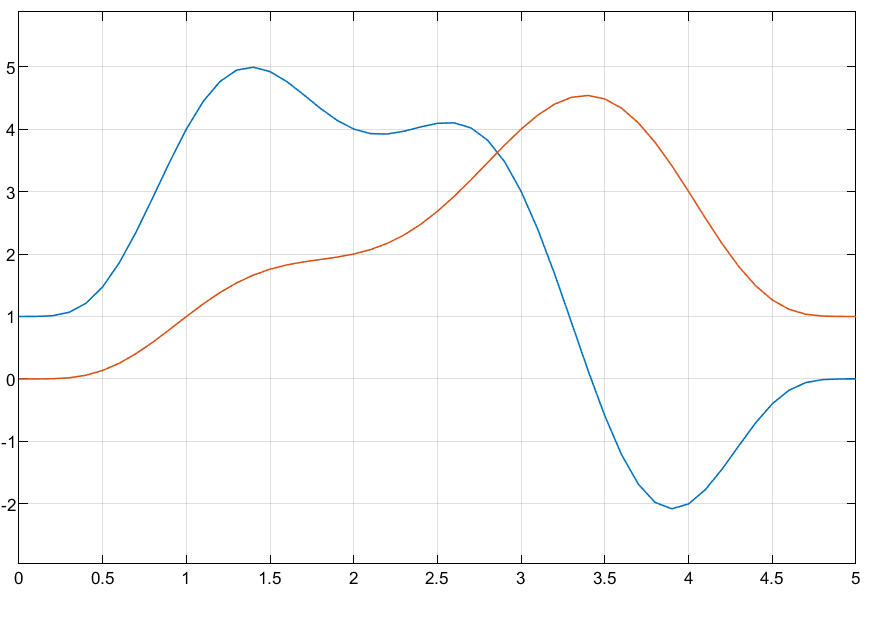
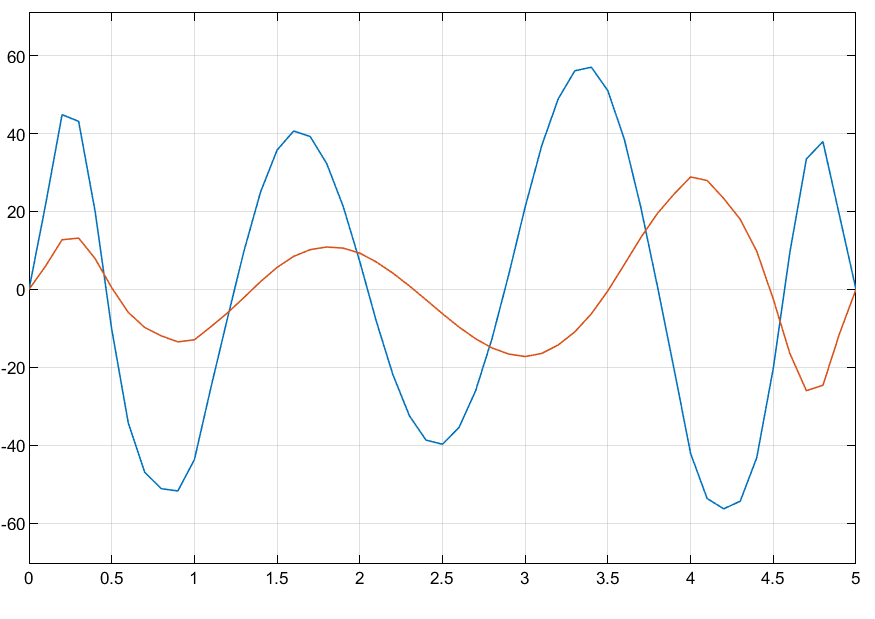
シミュレーションを実行します。Scope ブロックは、"q" 端子の位置出力、"qd" 端子の速度出力、"qdd" 端子の加速度出力、"qddd" 端子の軌跡の加加速度の出力、および qdddd 端子の軌跡のスナップの出力を可視化します。
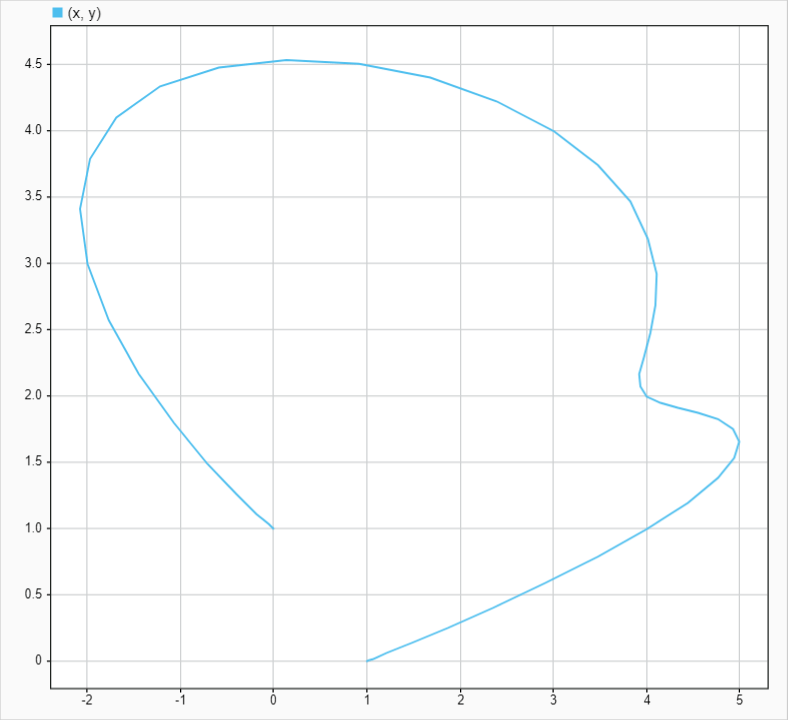
XY グラフには実際の 2 次元軌跡が示されています。この軌跡は定義された制御点の範囲内に留まり、最初と最後のウェイポイントに到達しています。
位置
速度

加速度

加加速度
スナップ

"x" 位置および "y" **位置**