Stateflow チャートでのカスタムの C または C++ コードの使用
Stateflow® チャートにカスタムの C または C++ のコードを統合すると、チャートで C や C++ のコードを呼び出して、コード ライブラリを利用できます。カスタム コードを使用して、次のことができます。
特殊なアルゴリズムにアクセスする。
既存のコード ライブラリを再利用する。
複雑な数学演算を実装する。
シミュレーション モデルと量産コードの一貫性を維持する。
カスタム C コードの統合
この例では、カスタム C コードを使用して、チャートでアクセスできる定数、変数、および関数を定義する方法を説明します。
チャートへのカスタム C++ コードの統合の詳細については、Stateflow チャート内のカスタム C++ コードへのアクセスを参照してください。
次の Stateflow チャートは、カスタム コード関数 custom_function を呼び出します。この関数は、チャートの入力データ signal とローカル データ threshold を読み取ります。次にそれらの値を比較して、HIGH、MEDIUM、LOW という 3 つのカスタム グローバル定数のいずれかを返します。この戻り値に基づいて、チャートによってステートの遷移が判定され、カスタム変数 custom_var が変更されます。

このチャートが使用するカスタム コードを表示するには、次のようにします。
[コンフィギュレーション パラメーター] ダイアログ ボックスを開きます。
[シミュレーション ターゲット] ペインをクリックします。
[コード情報] タブを選択します。
[インクルード ヘッダー] タブには、ヘッダー ファイル sf_custom_header.h を指定する #include ステートメントが含まれています。このファイルには、3 つの静的なグローバル定数の定義と、変数 custom_var および関数 custom_function の宣言が含まれています。
[ソース ファイル] タブは、ソース ファイル sf_custom_source.c を指定します。このファイルは custom_var の初期値をゼロに設定し、関数 custom_function を定義します。
これらのファイルは、モデルが格納されているのと同じフォルダーにあります。別のフォルダーにあるカスタム コード ファイルにアクセスするには、相対パス名を使用します。詳細については、ソース ファイルとライブラリへのパスの指定を参照してください。

このモデルのシミュレーションを行うと、Stateflow はソース ファイルとチャートを単一の S-Function MEX ファイルにコンパイルします。このカスタム定義が、生成されたマシンのヘッダー ファイル (sf_custom_header.h) の先頭に配置されます。これにより、シミュレーション中にモデル内のすべてのチャートがカスタム コードにアクセスできます。

カスタム コードの構成
シミュレーション用のカスタム コード設定の指定
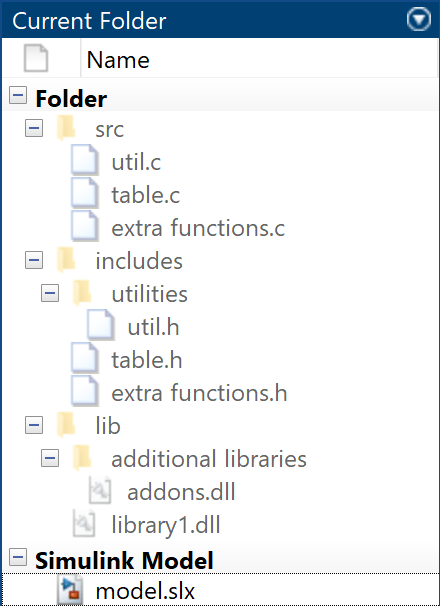
C のソース、ヘッダー、およびライブラリ ファイルを指定する例は、次のフォルダー構造に基づいています。
シミュレーション中にモデルがカスタム コードにアクセスするように構成するには、次の手順に従います。
[コンフィギュレーション パラメーター] ダイアログ ボックスを開きます。この方法の詳細については、ダイアログ ボックスを使用したコンフィギュレーション パラメーターの設定 (Simulink)を参照してください。
[シミュレーション ターゲット] ペインの [コード情報] タブで、次のパラメーターを指定します。
インクルード ヘッダー — 生成される
model.h#includeステートメントと#defineステートメントを入力できます。カスタム ヘッダー ファイルをインクルードする場合は、ファイル名を二重引用符で囲む必要があります。詳細については、ヘッダーを含める (Simulink)を参照してください。メモ
このパラメーターで指定するコードには、
extern int xやextern void myfun(void)など、変数や関数のextern宣言をインクルードすることが可能です。ただし、int xやvoid myfun(void)などのグローバル変数や関数定義は、その定義が生成コードのソース ファイルに複数回出現するため、リンク エラーを引き起こします。

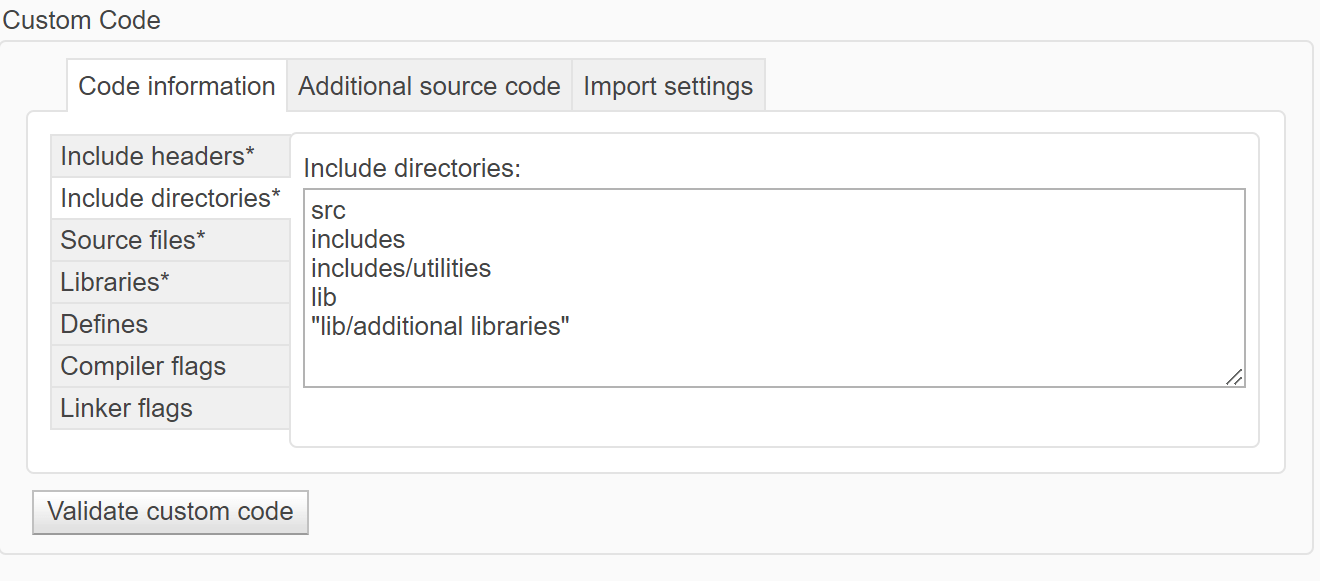
インクルード ディレクトリ — コンフィギュレーション パラメーターに直接的に、またはコンパイルされるターゲットに間接的にインクルードするカスタム ヘッダー、ソース、およびライブラリの各ファイルを含むフォルダー パスのリストを入力します。エントリを区切るには、改行、コンマ、スペース、またはセミコロンを使用できます。詳細については、Include directories (Simulink)を参照してください。
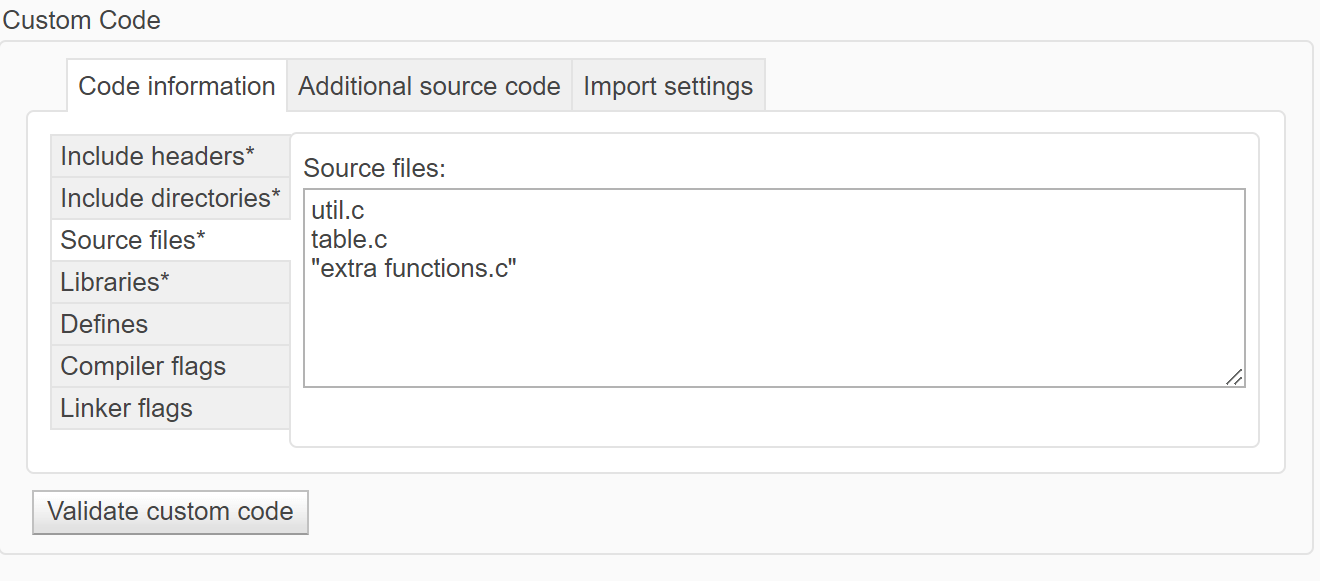
ソース ファイル — コンパイルしてターゲットにリンクするソース ファイルのリストを、改行、コンマ、スペース、またはセミコロンで区切って入力します。詳細については、Source files (Simulink)を参照してください。
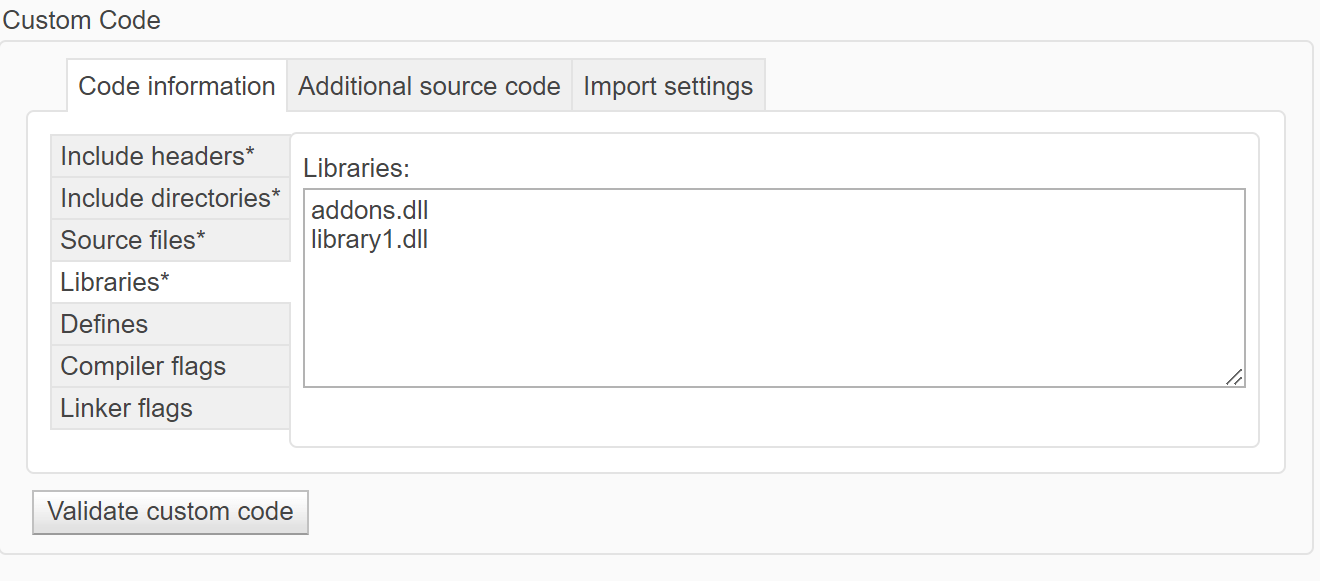
ライブラリ — ターゲットにリンクするカスタム オブジェクト コードを含むスタティック ライブラリのリストを、改行、コンマ、スペース、またはセミコロンで区切って入力します。詳細については、ライブラリ (Simulink)を参照してください。
定義 — 生成コードに追加するプリプロセッサ マクロ定義のリストをスペースで区切って入力します。詳細については、定義 (Simulink)を参照してください。
コンパイラ フラグ — カスタム コードのコンパイル時にコンパイラのコマンド ラインに追加する追加のコンパイラ フラグを入力します。詳細については、Compiler flags (Simulink)を参照してください。
リンカー フラグ — カスタム コードのリンク時にリンカーのコマンド ラインに追加する追加のリンカー フラグを入力します。詳細については、Linker flags (Simulink)を参照してください。
[詳細設定パラメーター] の [カスタム コードのインポート] (Simulink) がオンになっていることを確認します。このパラメーターは既定で有効になっています。
コマンド ライン API を使用したシミュレーション オプションの設定の詳細については、プログラムによるコンフィギュレーション パラメーターの設定を参照してください。
コード生成用のカスタム コード設定の指定
モデルがコード生成用のカスタム コードにアクセスするように構成するには、[コンフィギュレーション パラメーター] ダイアログ ボックスの [コード生成] 、 [カスタム コード] ペインを使用します。コード生成時に、シミュレーションに使用したものと同じカスタム コード設定、または固有のカスタム コード設定を使用できます。
シミュレーションに使用したものと同じカスタム コード設定を使用するには、[シミュレーション ターゲットと同じカスタム コードの設定を使用] をオンにします。シミュレーション用のカスタム コード設定の指定の説明に従って、[シミュレーション ターゲット] ペインでカスタム コード設定を指定します。
固有のカスタム コード設定を使用するには、[シミュレーション ターゲットと同じカスタム コードの設定を使用] をオフにします。[コード情報] タブで、コード生成用のカスタム コード設定を指定します。このタブのパラメーターの説明については、シミュレーション用のカスタム コード設定の指定を参照してください。

詳細については、シミュレーション ターゲットと同じカスタム コードの設定を使用 (Simulink Coder)およびモデル コンフィギュレーション パラメーターを使用した外部コードの統合 (Simulink Coder)を参照してください。
ステートと遷移におけるカスタム コード関数の呼び出し
カスタム コード関数は、任意のステートや遷移のアクション、またはチャート内の他の関数から呼び出すことができます。
カスタム コード関数を呼び出すには、ヘッダー ファイルの関数の宣言で指定したシグネチャを使用します。関数シグネチャの各仮引数に、引数の値を設定します。
return_val = function_name(arg1,arg2,...)
カスタム コードの構成
モデルにライブラリ チャートが含まれる場合は、チャートをモデルに提供する各ライブラリ モデルのカスタム コード設定を構成します。詳細については、ライブラリ モデル内のカスタム コードの構成を参照してください。
MATLAB® をアクション言語として使用するチャートでは、カスタム コードで
#defineステートメントはサポートされません。チャートとカスタム コードの間で定数を共有するには、マクロではなく、静的なグローバル定数を使用します。カスタム コードと Stateflow チャートの間では、固定小数点データは共有しないでください。
ソース ファイルとライブラリへのパスの指定
モデルの更新時、またはシミュレーションの開始時に、モデルはソース ファイルとライブラリを次の順に検索します。
作業フォルダー。詳細については、Working folder (MATLAB Coder)を参照してください。
モデル フォルダー (このフォルダーが作業フォルダーと異なる場合)
[インクルード ディレクトリ] フィールドで指定するフォルダーのリスト
ツールボックス フォルダーを除く、MATLAB 検索パス上にあるすべてのフォルダー
相対パスの構文に関するガイドライン
モデル フォルダーへの相対パスを使用して、カスタム コードの場所を指定できます。たとえば、前の例で、カスタム コードのソース ファイルとヘッダー ファイルをモデル フォルダーのサブフォルダー CustomCode/SourceFiles および CustomCode/HeaderFiles に保存したとします。これらのファイルにアクセスするには、[インクルード ディレクトリ] パラメーターを使用してサブフォルダーの相対パスを指定します。

あるいは、相対パス名を使用して、ヘッダー ファイルとソース ファイルを個別に指定できます。
[インクルード ヘッダー] に次のパス名を入力します。
#include "./CustomCode/HeaderFiles/sf_custom_code_constants_vars_fcns_hdr.h"[ソース ファイル] に次のパス名を入力します。
./CustomCode/HeaderFiles/sf_custom_code_constants_vars_fcns_src.c
カスタム コードの相対パスを構成するときには、以下の構文のガイドラインに従います。
相対パスの開始位置としてモデル フォルダーを示すには、
./pathnameまたは.\pathnameを使用する。相対パスの開始位置としてその親フォルダーを示すには、../pathnameまたは..\pathnameを使用する。使用しているプラットフォームにかかわらず、ファイル区切りとしてスラッシュ (
/) またはバックスラッシュ (\) を使用する。パスに空白やハイフン (
-) などの非標準パス文字が含まれる場合は、パスを二重引用符 ("...") で囲む。以下の場合は、式をドル記号 (
$...$) で囲む:式を MATLAB ワークスペースで評価する。この例では、
CustomCodeFolderを MATLAB ワークスペースで"module1"として定義した変数と仮定します。パス名.\work\source\$CustomCodeFolder$を使用してカスタム コード ファイルを指定すると、モデルはフォルダー.\work\source\module1でカスタム コード ファイルを検索します。カスタム コード ファイルのパスを生成する MATLAB 関数を使用する。このような関数は MATLAB 検索パス上になければなりません。
たとえば、コマンド
fileparts(mfilename('fullpath'))を実行すると、関数myFolderFcnがカスタム コード フォルダーのパスを返すとします。パス名$myFolderFcn$/myCustomFileを使用してカスタム コード ファイルを指定すると、モデルはmyFolderFcnによって返されたフォルダーでmyCustomFileを検索します。