このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
シミュレーション データ インスペクター
データとシミュレーション結果を検証および比較し、モデルの設計を検証して反復する
説明
シミュレーション データ インスペクターは、複数の種類のデータを可視化して比較します。
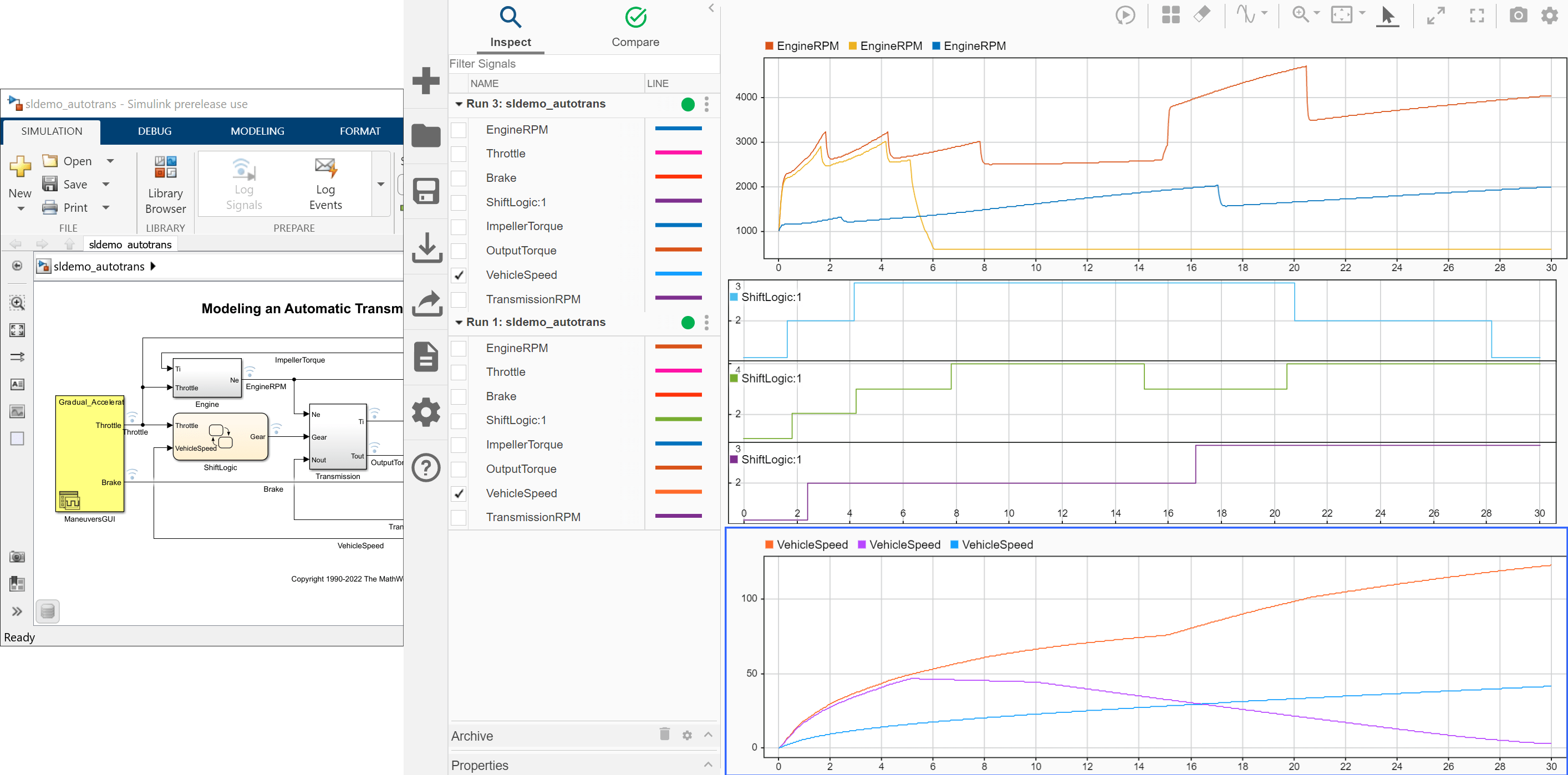
シミュレーション データ インスペクターを使用すると、ワークフローの複数の段階で時系列データを検証および比較できます。このワークフロー例では、シミュレーション データ インスペクターによって設計サイクルのすべての段階がどのようにサポートされるかを示しています。
シミュレーション データ インスペクターでのシミュレーション データの表示 (Simulink)またはワークスペースまたはファイルからシミュレーション データ インスペクターへのデータのインポート (Simulink)
シミュレーション データ インスペクターにデータを記録するように設定されたモデルでシミュレーションを実行するか、ワークスペースまたはファイルからデータをインポートします。モデルのブロック線図、パラメーター値、モデル コンフィギュレーションを繰り返し変更しながら、モデルの入力データを表示して確認したり、記録されたシミュレーション データを検証できます。シミュレーション データのログ記録の詳細については、シミュレーション データの保存 (Simulink)を参照してください。
シミュレーション データの検証 (Simulink)
複数のサブプロットに信号をプロットしたり、指定したプロットの座標軸をズームイン/ズームアウトしたり、データ カーソルを使用して、データを理解して評価します。時間、配列、マップ、スパークライン、XY のプロットなど、いくつかの可視化から選択できます。データの効果的な表示の詳細については、シミュレーション データ インスペクターを使用したプロットの作成 (Simulink)を参照してください。
シミュレーション データの比較 (Simulink)
個々の信号またはシミュレーションの実行を比較し、相対許容誤差、絶対許容誤差、および時間の許容誤差との比較結果を解析できます。シミュレーション データ インスペクターの比較ツールは、反復設計を容易にし、許容誤差の要件を満たしていない信号を強調表示できます。比較演算の詳細については、シミュレーション データ インスペクターでデータを比較する方法 (Simulink)を参照してください。
シミュレーション データ インスペクターのデータと表示の保存および共有 (Simulink)
シミュレーション データ インスペクターのデータとビューを保存して、他のユーザーと所見を共有します。
コマンド ラインからシミュレーション データ インスペクターの機能を利用することもできます。詳細については、プログラムによるデータの比較 (Simulink)を参照してください。
シミュレーション データ インスペクター を開く
Simulink® ツールストリップ: [シミュレーション] タブで、[結果の確認] にある [データ インスペクター] をクリックします。
モデルから、信号のストリーミング バッジをクリックしてシミュレーション データ インスペクターを開き、信号をプロットします。
MATLAB® コマンド プロンプトで、
「
Simulink.sdi.view(Simulink)」と入力して、シミュレーション データ インスペクターを開きます。Simulink.sdi.plot(Simulink) を使用して、シミュレーション データ インスペクターを開き、データをプロットします。
例
実行を作成し、それにデータを追加してから、シミュレーション データ インスペクターでそのデータを表示します。
実行用データの作成
2 つの timeseries オブジェクトを作成し、正弦信号と余弦信号のデータを含めます。各 timeseries オブジェクトに記述名を付けます。
time = linspace(0,20,100); sine_vals = sin(2*pi/5*time); sine_ts = timeseries(sine_vals,time); sine_ts.Name = "Sine, T=5"; cos_vals = cos(2*pi/8*time); cos_ts = timeseries(cos_vals,time); cos_ts.Name = "Cosine, T=8";
実行の作成とデータの追加
関数 Simulink.sdi.view を使用して、シミュレーション データ インスペクターを開きます。
Simulink.sdi.view
ワークスペースからシミュレーション データ インスペクターにデータをインポートするには、関数 Simulink.sdi.Run.create を使用して Simulink.sdi.Run オブジェクトを作成します。Run オブジェクトの Name プロパティと Description プロパティを使用して、実行に関する情報をそのメタデータに追加します。
sinusoidsRun = Simulink.sdi.Run.create; sinusoidsRun.Name = "Sinusoids"; sinusoidsRun.Description = "Sine and cosine signals with different frequencies";
関数 add を使用して、ワークスペースで作成したデータを空の実行に追加します。
add(sinusoidsRun,"vars",sine_ts,cos_ts);シミュレーション データ インスペクターでのデータのプロット
関数 getSignalByIndex を使用して、信号データが含まれる Simulink.sdi.Signal オブジェクトにアクセスします。Simulink.sdi.Signal オブジェクトのプロパティを使用して、信号ラインのスタイルと色を指定し、シミュレーション データ インスペクターで信号をプロットできます。各信号の LineColor プロパティと LineDashed プロパティを指定します。
sine_sig = getSignalByIndex(sinusoidsRun,1); sine_sig.LineColor = [0 0 1]; sine_sig.LineDashed = "-."; cos_sig = sinusoidsRun.getSignalByIndex(2); cos_sig.LineColor = [1 0 0]; cos_sig.LineDashed = "--";
関数 Simulink.sdi.setSubPlotLayout を使用して、シミュレーション データ インスペクターのプロット領域で 2 行 1 列のサブプロット レイアウトを設定します。次に、関数 plotOnSubplot を使用して、上のサブプロットに正弦信号をプロットし、下のサブプロットに余弦信号をプロットします。
Simulink.sdi.setSubPlotLayout(2,1); plotOnSubPlot(sine_sig,1,1,true); plotOnSubPlot(cos_sig,2,1,true);
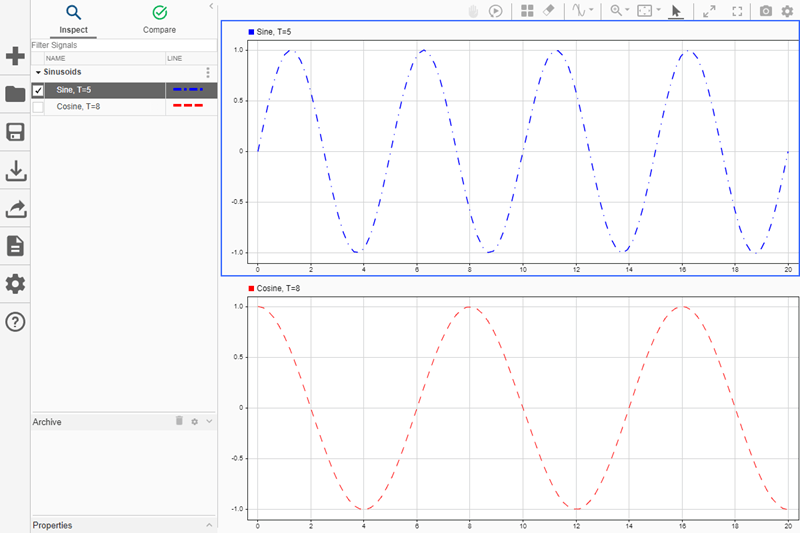
シミュレーション データ インスペクターを閉じてデータを保存
プロットされた信号データの検査が完了したら、シミュレーション データ インスペクターを閉じて、セッションを MLDATX ファイルに保存できます。
Simulink.sdi.close("sinusoids.mldatx")関数 Simulink.sdi.plot を使用して、シミュレーション データ インスペクターでシミュレーション結果をプロットできます。モデル vdp を開きます。これは、ファン デル ポールの 2 階微分方程式をモデル化したものです。モデルの詳細については、ファン デル ポール振動子 (Simulink)を参照してください。
mdl = "vdp";
open_system(mdl)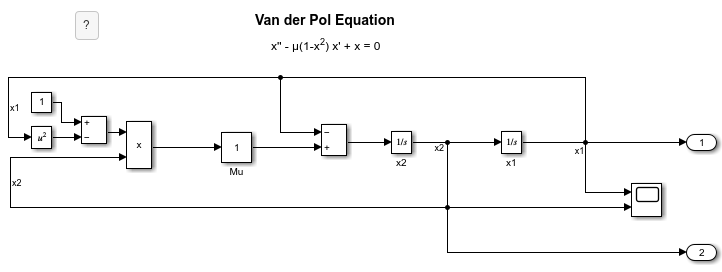
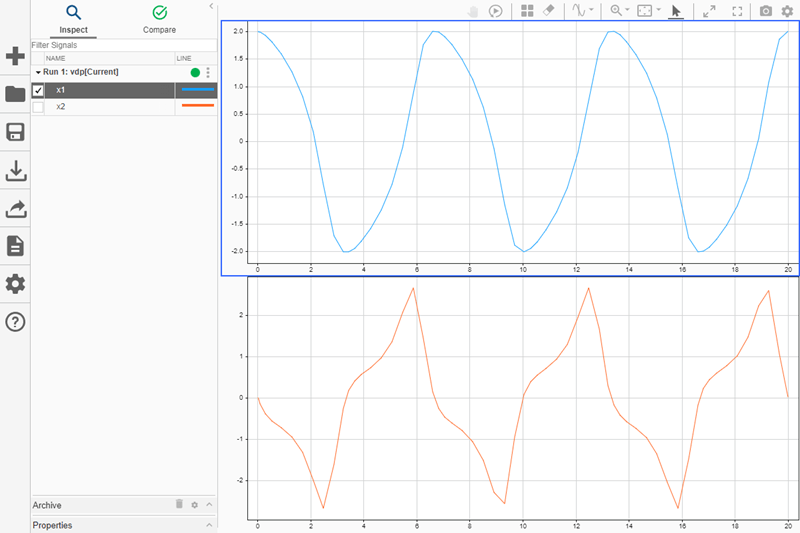
モデルのシミュレーションを実行します。このモデルは、2 つの信号 x1 と x2 をログ記録します。シミュレーション結果は、out という名前の単一の SimulationOutput オブジェクトに保存されます。
out = sim(mdl);
関数 Simulink.sdi.plot を使用して、シミュレーション データ インスペクターを開いて結果をプロットします。
Simulink.sdi.plot(out);
シミュレーション データ インスペクターのプログラム インターフェイスを使用して、複数の実行内にある同じ信号のパラメーターを変更できます。この例では、データの 4 回すべての実行において信号に絶対許容誤差 0.1 を追加します。
まず、ワークスペースをクリアし、データを指定してシミュレーション データ インスペクターのセッションを読み込みます。航空機の縦方向コントローラーの Simulink® モデルについて、4 つのシミュレーションから記録されたデータがセッションに含まれます。
Simulink.sdi.clear
Simulink.sdi.load('AircraftExample.mldatx');関数 Simulink.sdi.getRunCount を使用して、シミュレーション データ インスペクターの実行回数を取得します。この数値を、各実行を処理する for ループのインデックスとして使用できます。
count = Simulink.sdi.getRunCount;
次に、for ループを使用して、絶対許容誤差 0.1 を各実行の最初の信号に割り当てます。
for a = 1:count runID = Simulink.sdi.getRunIDByIndex(a); aircraftRun = Simulink.sdi.getRun(runID); sig = getSignalByIndex(aircraftRun,1); sig.AbsTol = 0.1; end
関連する例
- シミュレーション データ インスペクターでのシミュレーション データの表示 (Simulink)
- シミュレーション データの検証 (Simulink)
- シミュレーション データの比較 (Simulink)
- シミュレーション データ インスペクターを使用したモデル設計の反復処理 (Simulink)
- シミュレーション データの保存 (Simulink)
プログラムでの使用
バージョン履歴
R2010b で導入参考
関数
Simulink.sdi.clear(Simulink) |Simulink.sdi.clearPreferences(Simulink) |Simulink.sdi.snapshot(Simulink)