適応制御設計
制御システムに時間と共に変化する不確かさが含まれる場合 (モデル化されていないシステム ダイナミクスや外乱など)、適応コントローラーでは、パラメーターをリアルタイムで調整することで変化するプロセス情報を補正できます。そうすることで、このようなコントローラーでは、プラント ダイナミクスの不確かさに関係なく目的の設定値追従を達成できます。
Simulink® Control Design™ ソフトウェアには、次のリアルタイムの適応制御法用のブロックが用意されています。
極値探索制御 — 制御システムから導出された目的関数を最大化する、モデルに依存しない適応
モデル規範形適応制御 — 既知の参照モデルの出力を追跡する適応
反復学習制御 — 反復制御タスクのパフォーマンスを高めるためのモデルベースおよびモデルに依存しない適応。
スライディング モード制御 — システムの状態を滑り面で維持することで、不確かさや外乱がある場合の高精度でロバストな制御を実現。
Virtual Reference Feedback Tuning — 入出力データに基づいて線形パラメーター化されたコントローラーを自動的に調整。
適応ノッチ フィルター — 検出された共振に基づいてノッチ フィルターの周波数、深さ、および幅を自動的に調整。
ブロック
| Extremum Seeking Control | 目的関数の最大化によるコントローラー パラメーターのリアルタイムでの計算 |
| Model Reference Adaptive Control | 制御対象システムを参照モデルに追従させる制御動作の計算 (R2021b 以降) |
| Iterative Learning Control | Design iterative learning controller for repetitive control tasks (R2024b 以降) |
| Sliding Mode Controller (Reaching Law) | Design sliding mode controller based on reaching law (R2024b 以降) |
| Linear Sliding Mode Controller (State Feedback) | Design sliding mode control with knowledge of linear systems using state feedback (R2025a 以降) |
| Virtual Reference Feedback Tuning | Automatically tune linearly parameterized controllers based on input-output data (R2025a 以降) |
| Adaptive Notch Filter | Automatically adjust notch filter parameters based on detected resonance (R2026a 以降) |
関数
vrfttune | Tune controller parameters using virtual reference feedback tuning (VRFT) (R2026a 以降) |
vrfttuneOptions | Create options for virtual reference feedback tuning (R2026a 以降) |
トピック
極値探索制御
- 極値探索制御
不明なシステム ダイナミクスがある場合のコントローラー パラメーターの更新による目的関数の最大化。 - 不確かさをもつシステムの参照モデルに対する極値探索制御
不確かさをもつ動的システムにフィードフォワード ゲインおよびフィードバック ゲインを適応することにより、参照プラント モデルを追従する。 - 極値探索制御を使用したアンチロック ブレーキ
ABS システムの摩擦係数を最大化して最短停止距離を実現する極値探索コントローラーを設計する。
モデル規範形適応制御
- モデル規範形適応制御
不確かさをもつ制御対象システムを特定の参照プラント モデルの動作に追従させる制御動作を計算する。 - 衛星の回転のモデル規範形適応制御
プラントの不確かさのモデルのパラメーターを適応させることで理想の参照モデルに匹敵する性能を実現する、MRAC コントローラーを設計する。 - 1 次システムの間接的なモデル規範形適応制御
不明な 1 次システムのプロパティを推定する間接的な MRAC コントローラーを設計する。 - マス-バネ-ダンパー システムの間接的な MRAC 制御
不明な MIMO システムのパラメーターを推定する間接的な MRAC コントローラーを設計する。
スライディング モード制御
- スライディング モード制御
到達則に基づいてスライディング モード制御を設計する。 (R2024b 以降) - Sliding Mode Control Design for Mass-Spring-Damper System
A sliding mode controller defines a sliding surface that the system state converges to and remains on. (R2024b 以降) - Sliding Mode Control Design for a Robotic Manipulator
Create a sliding mode controller for a robotic manipulator with two actuated joints. (R2024b 以降) - Stabilize Chua System Using Sliding Mode Controller
Design sliding mode controller to stabilize a chaotic system. (R2025a 以降) - Sliding Mode Control of DC Motor
Design SMC for reference tracking for a DC motor. (R2025a 以降)
反復学習制御
- 反復学習制御
反復制御タスクの反復学習制御を設計する。 (R2024b 以降) - Iterative Learning Control of a Single-Input Single-Output System
Implement an ILC controller to improve closed-loop trajectory tracking performance. (R2024b 以降) - Model Based Iterative Learning Control of Multi-Input Multi-Output System
Implement model-based ILC controller to improve closed-loop trajectory tracking performance of a MIMO system. (R2024b 以降)
Virtual Reference Feedback Tuning
- Virtual Reference Feedback Tuning
Automatically tune linear controllers such as FIR, PID, or a combination of linearly parameterized controllers based on input-output data. - Tune PID Controller for Mass-Spring-Damper System Using Virtual Reference Feedback Tuning Block
Tune PID controller for mass-spring-damper using VRFT. (R2025a 以降) - Tune FIR Filter Type Controller for Flexible Transmission System Using Virtual Reference Feedback Tuning Block
Tune FIR filter type controller using VRFT. (R2025a 以降) - Tune PID Controller for Mass-Spring-Damper System Using VRFT at Command Line
Tune PID controller at command line using thevrfttunefunction. (R2026a 以降)
適応ノッチ フィルター
- Suppress PMSM Harmonics Using Adaptive Notch Filter
Reduce harmonic distortion in a PMSM using an extremum seeking control based adaptive notch filter. (R2025a 以降) - Suppress Resonances Using Adaptive Notch Filter
Suppress resonances in a coupled inertia system using an adaptive notch filter implement using extremum seeking control and frequency response estimator. (R2025a 以降)
注目の例

極値探索制御を使用したアダプティブ クルーズ コントロール
アダプティブ クルーズ コントロール システムのコントローラー ゲインを調整するための極値探索コントローラーを設計する。

ウイング ロックが発生した航空機のモデル規範形適応制御
外乱モデルのパラメーターを適応させることで理想の参照モデルに匹敵する性能を実現する、MRAC コントローラーを設計する。

Quadrotor Control Using Model Reference Adaptive Control
Control a quadrotor vehicle performing way-point guidance using model reference adaptive control.
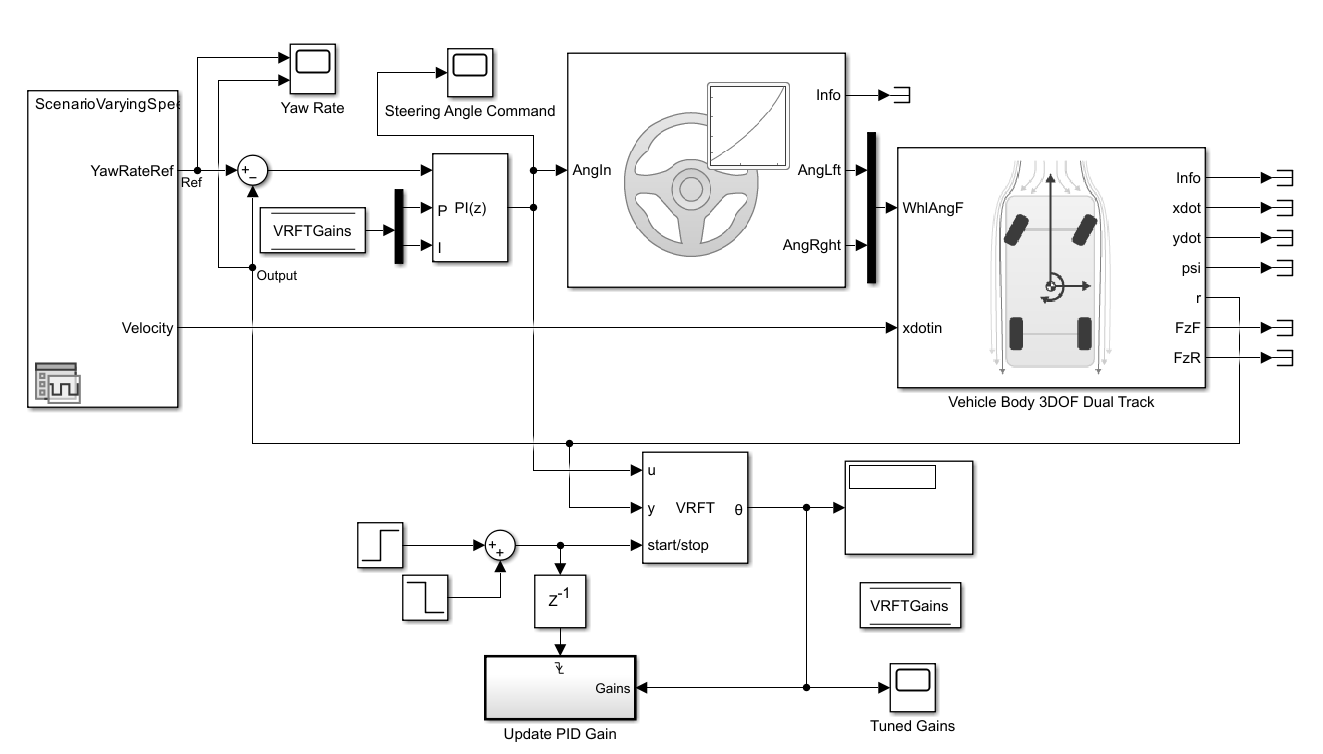
Virtual Reference Feedback Tuning ブロックを使用した、車両の横方向制御システムの PID コントローラーの調整
Virtual Reference Feedback Tuning ブロックを使用して、車両の横方向制御システムの PID コントローラーを調整する。
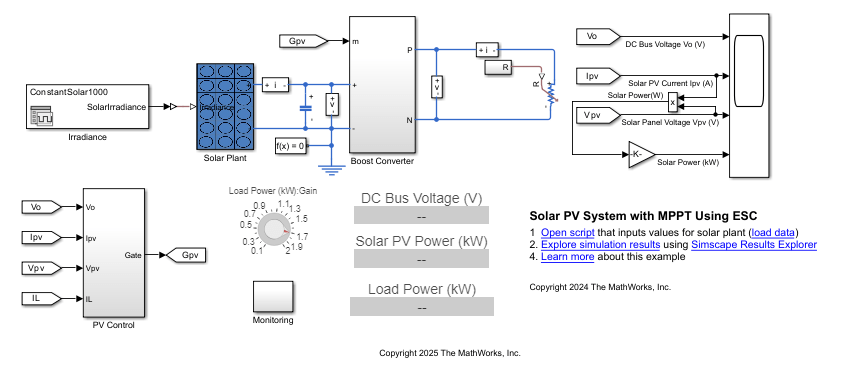
Solar PV System with Maximum Power Point Tracking Using Extremum Seeking Control
Implement the MPPT algorithm in a solar photovoltaic system using extremum seeking control.

Battery State of Charge Estimation using Extremum Seeking Control
Use ESC as a virtual sensor for battery cell state of charge estimation.
Quadrotor Trajectory Tracking Using Iterative Learning Control
Minimize trajectory tracking error for quadrotor under wind disturbances using iterative learning control.
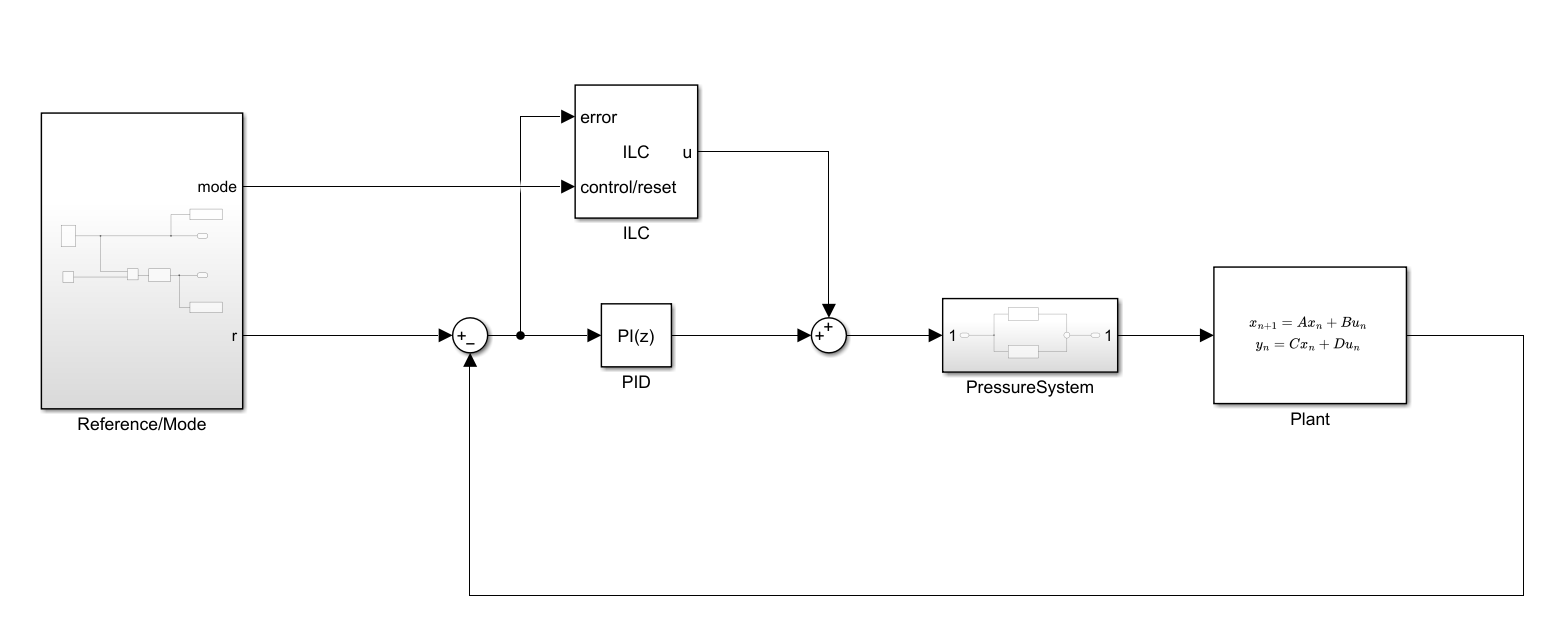
Soft Robot Control Using Iterative Learning Control
Demonstrates control of soft robot using the Iterative Learning Control (ILC) block in Simulink®. The soft-robot arm is commanded to track a step signal, while the actuators are pressure actuated using soft bellows. This example demonstrates, using ILC over repeated iterations, the controller learns to minimize error and get close tracking of given reference signal.