Virtual Reference Feedback Tuning ブロックを使用した、車両の横方向制御システムの PID コントローラーの調整
この例では、Virtual Reference Feedback Tuning (VRFT) ブロックを使用して、より現実的な非線形プラント モデルの PID コントローラーを調整する方法を説明します。この例では、鈴木元哉氏が [1] で紹介した車両の横方向制御システムの VRFT コントローラーの調整を実際に示します。
車両の横方向制御プラント モデル
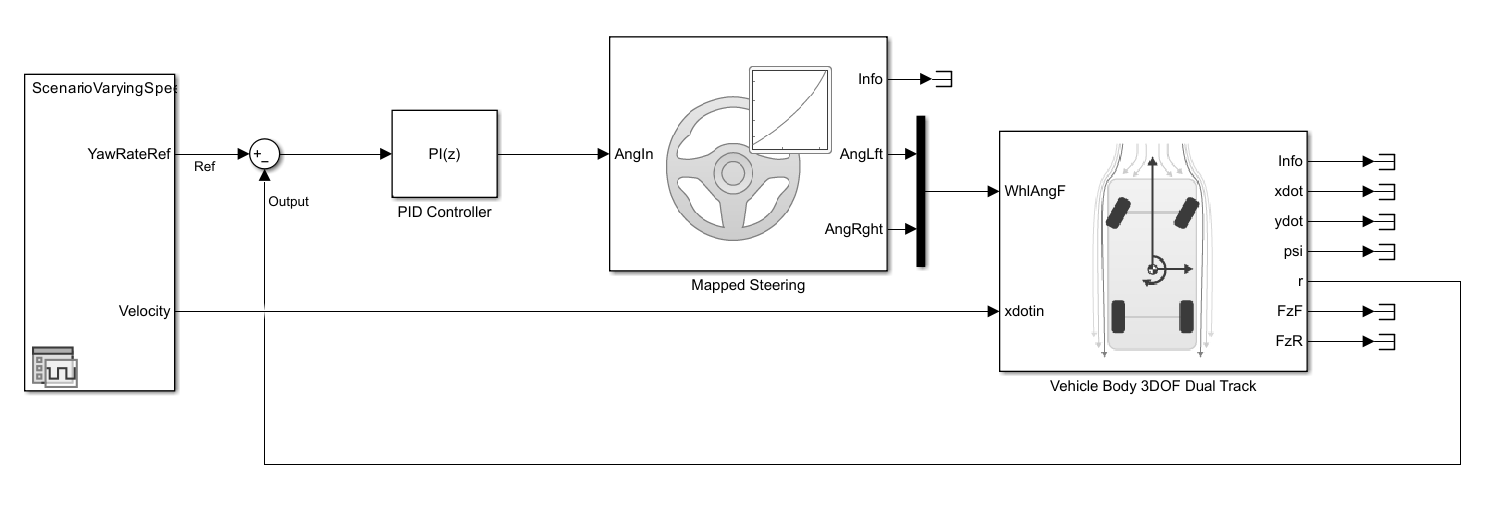
横方向制御システムの目的は、さまざまな速度レベルにおいて、ヨーレート基準信号に従うように車両のステアリング角度を制御することです。VDBLateralControlBasicDemo モデルは、Vehicle Dynamics Blockset™ のブロックを使用して作成されています。
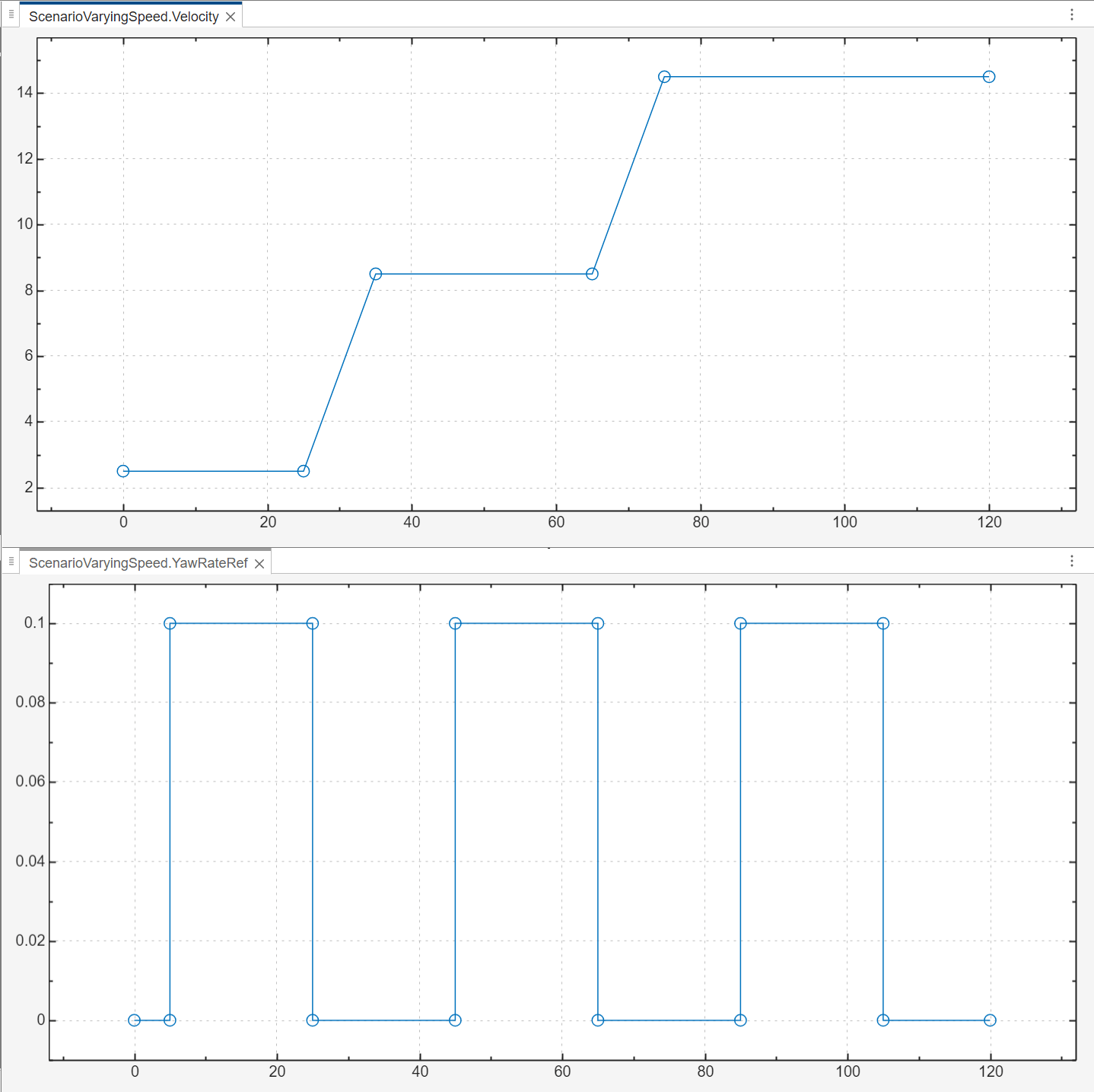
速度およびヨーレートの基準信号が、次のスクリーンショットにプロットされています。車両速度は一定レベルで安定しますが、ヨーレートは速度にかかわらず、同じ矩形波信号に従う必要があります。
VRFT 調整を含む閉ループ モデル
プラント モデルとしての車両の横方向制御システム、および調整用に事前構成された VRFT ブロックを含む Simulink® モデルを開きます。
mdl = 'VDBLateralControlVRFTDemo.slx';
open_system(mdl);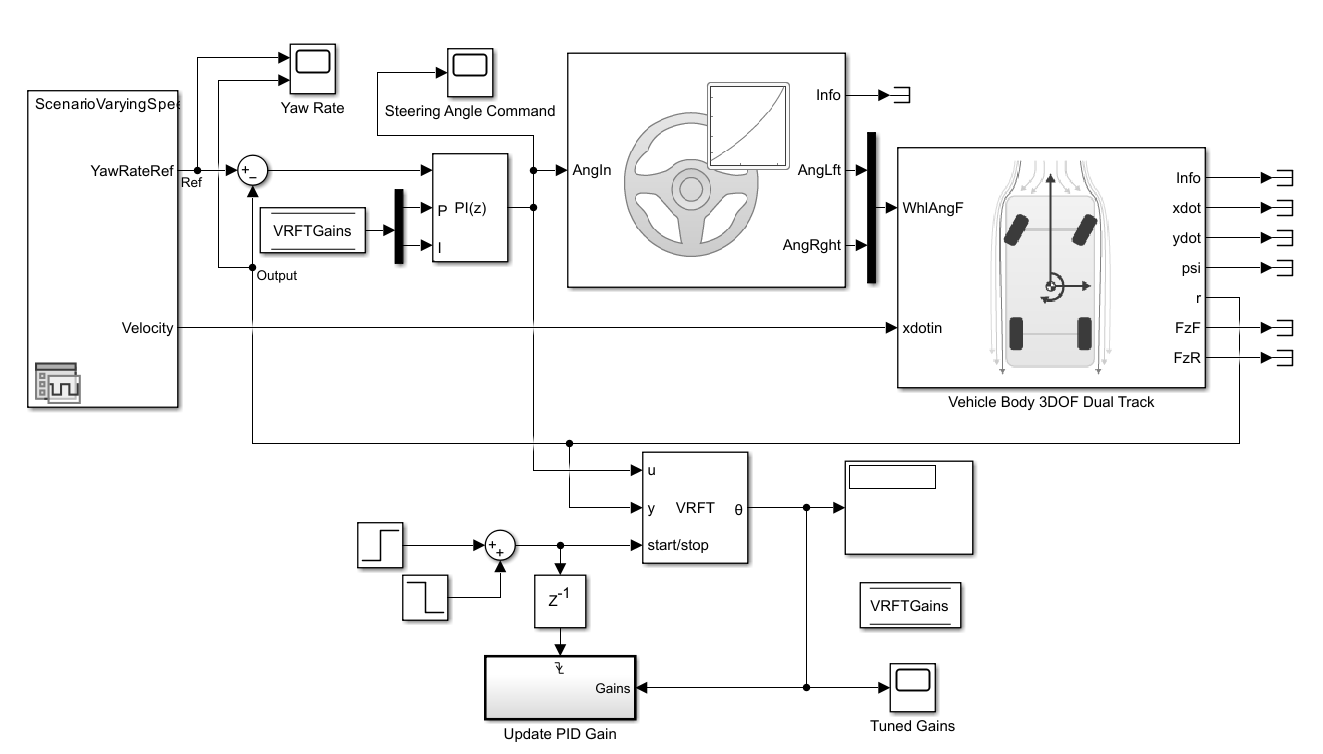
このモデルには、出力を調整する初期 PI コントローラーが含まれています。このパフォーマンスは理想的ではなく、ゆっくりとした旋回動作に対応しています。コントローラーの初期ゲインは Kp = 12 および Ki = 6 です。
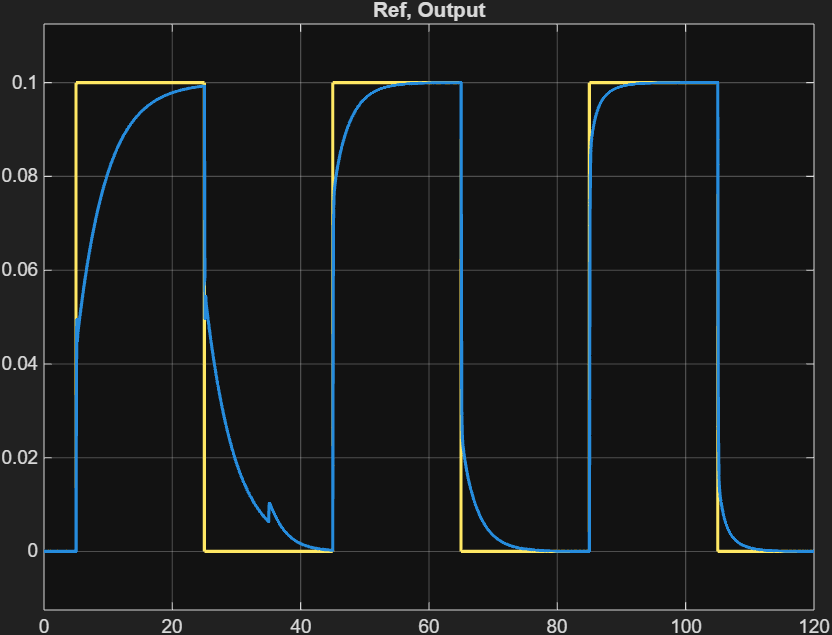
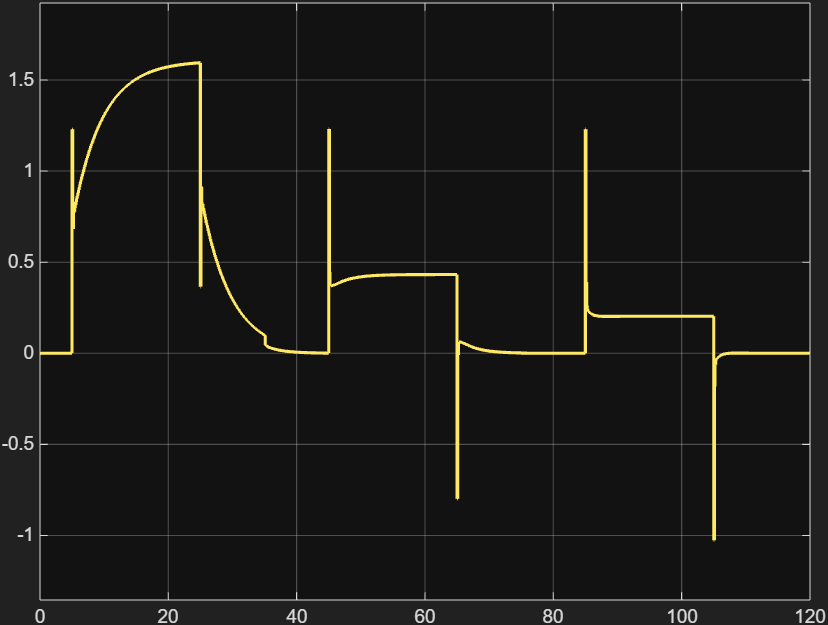
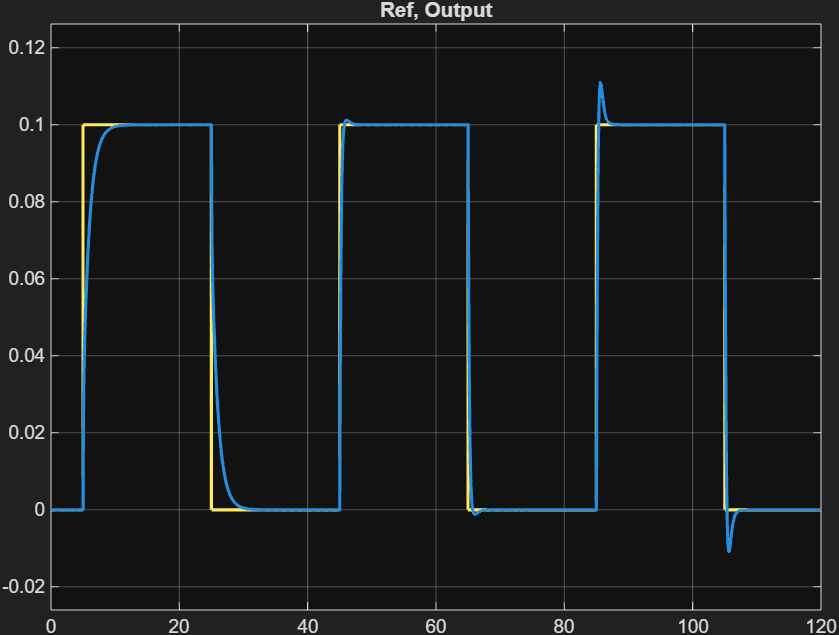
最初のプロットは、基準ヨー レートと車両ダイナミクス モデルの実際の出力の比較を示しています。低速時には、ヨー レートが矩形波の基準信号に十分に追従していないことが明らかです。ただし、このパフォーマンスを達成するために、2 番目のプロットのステアリング角度に示された大きなピークは、ステアリング ホイールを使用して実現することが困難と思われます。その結果、横方向制御システムには、さまざまな速度レベルで基準ヨーレートを追跡する改善の余地があります。
PI コントローラーの調整は、VRFT ブロックを使用すると簡単です。参照モデルは最も重要なパラメーターです。この例では、基準モデルとして伝達関数 tf(1,[0.2 1]) を使用します。低い周波数範囲の調整に重点を置くため、重み付け関数を tf(1,[0.01 1]) に設定します。調整プロセスの完了後、PI コントローラーのゲインを更新するようにモデルを設定します。PID 自動調整器ブロックとは異なり、VRFT はシステム同定の目的でプラント モデルに追加の摂動信号を注入しません。
SimOut = sim(mdl); PIDGains = SimOut.ScopeData.signals.values; Kp = PIDGains(1)
Kp = 6.7302
Ki = PIDGains(2)
Ki = 20.5267
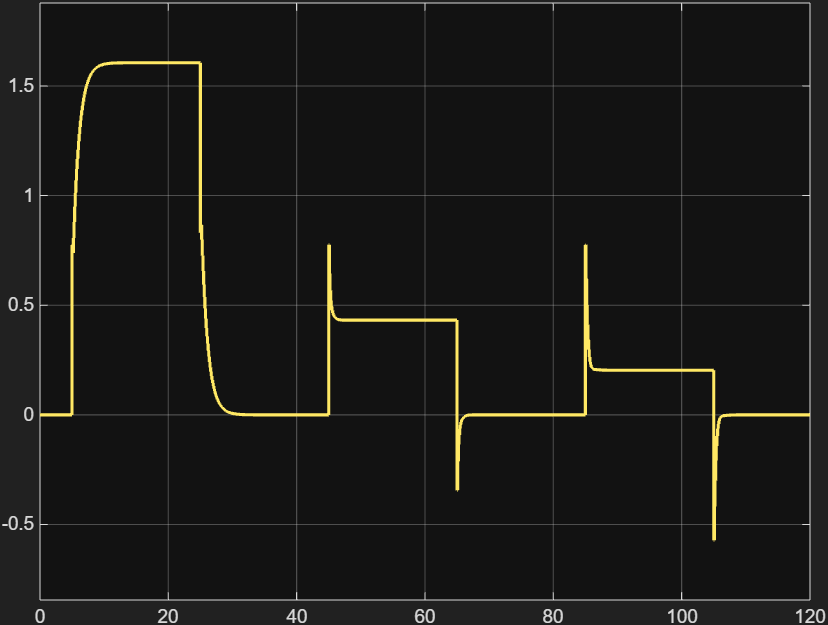
調整後の PI コントローラーのゲインと元のモデル VDBLateralControlBasicDemo を使用することにより、ヨーレートはさまざまな速度レベルで、基準信号により速く追従します。同時に、元の PI コントローラーと比較してステアリング角度のピークは非常に小さくなります。
何も変更せずに現在の Simulink モデルを閉じます。
close_system(mdl,0);
この例では、Virtual Reference Feedback Tuning (VRFT) ブロックを使用して、より現実的な車両の横方向制御システムの PI コントローラーを調整しました。閉ループ構成のプラント モデルから収集したステアリング角度とヨーレートの測定データ シーケンスを使用することにより、VRFT ブロックはフィードバック ループを壊すことなく、既存の車両の横方向コントローラーのパフォーマンスを改善しました。調整プロセスには、さまざまな速度レベルでのステアリング操作が含まれています。これにより、速度の変化する状況下で、調整後のゲインによって満足のいく制御パフォーマンスが確実に達成されます。さらに、データ駆動型の調整方法では、従来のモデルベースの調整方法と比較して、さまざまな操作点でより良い調整結果が得られます。
参考文献
[1] Motoya Suzuki, Isuzu Advanced Engineering Center."Automated Generation of Lateral Motion Controllers for Autonomous Trucks Using Data-Driven Control."MATLAB EXPO, Japan, 2022. https://www.mathworks.com/company/user_stories/isuzu-advanced-engineering-center-develops-automatic-lateral-motion-controller-generation-tool-for-automated-trucks.html.
参考
Virtual Reference Feedback Tuning