一般分野への適用
Simulink® を使用して、幅広い動的システムをモデル化してシミュレーションできます。モデル例では、単純なものから複雑なものまで、さまざまな一般分野への適用について説明しています。
注目の例

跳ねるボールのシミュレーション
この例では、跳ねるボールの 2 つのモデルを使用して、Zeno 動作があるハイブリッド動的システムをモデル化する異なるアプローチを示します。Zeno 動作の簡略的な特徴として、特定の複合システムに対して一定の時間間隔で無限個のイベントが発生することが挙げられます。ボールがエネルギーを失うにつれ、連続したより短い時間間隔で地面と衝突するようになります。
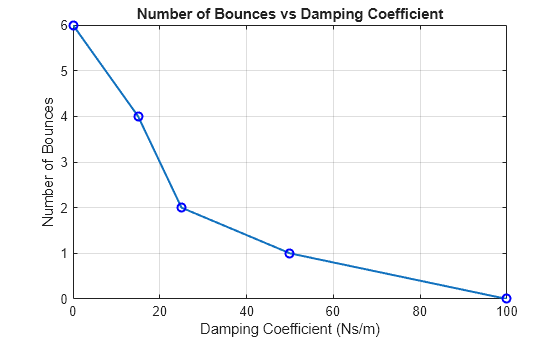
Analyze Impact of Model Parameters on Bouncing Ball Simulation
Analyzes the impact of the damping coefficient on a mass-spring-damper model of the dynamics of a bouncing ball. The example runs a set of simulations. Each simulation uses a different value of the parameter that represents the damping coefficient. By visualizing and postprocessing the results of the simulations, the example explores these questions:
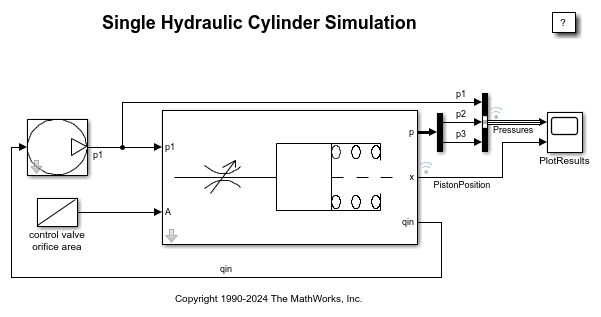
1 つの油圧シリンダーのシミュレーション
この例では、Simulink® を使用して油圧シリンダーをモデル化する方法を示します。これらのコンセプトは、油圧動作をモデル化する必要のあるさまざまな用途に適用可能です。

家の熱モデル
この例では、Simulink® を使用して家の熱モデルを作成する方法を示します。このシステムでは、屋外環境、家の熱特性、および家の暖房システムがモデル化されます。

非線形関係の近似: S タイプ熱電対
この例では、タイプ S 熱電対の非線形関係を近似する方法を示します。

デジタル波形生成: 正弦波の近似
この例では、組み込みシステムと、任意の波形生成機器におけるデジタル波形合成アプリケーションで使用する、正弦波データ テーブルを設計および評価する方法について説明します。
正確なゼロクロッシング検出
この例では、Simulink® でのゼロクロッシング検出の仕組みを示します。Simulink では、ゼロクロッシング検出を使用して、ソルバーのタイム ステップを下げることなく、急激なモデルの変化や不連続点を正確にシミュレートします。詳細については、ゼロクロッシング検出を参照してください。

MATLAB Function ブロックを使用したらせん状の銀河形成シミュレーション
MATLAB Function ブロックを使用して銀河の相互作用をシミュレーションしてプロットする。

条件付き実行サブシステムを使ったカウンター
この例では、Enabled Subsystem および Triggered Subsystem を使用してカウンターを実装する方法を示します。この例では、モデル sldemo_counters がタンクへの水の流れを制御し、オーバーフローの発生回数をカウンターでカウントします。タンクの水位が 30 秒以上にわたって 8 メートル以上になるとオーバーフローが発生します。
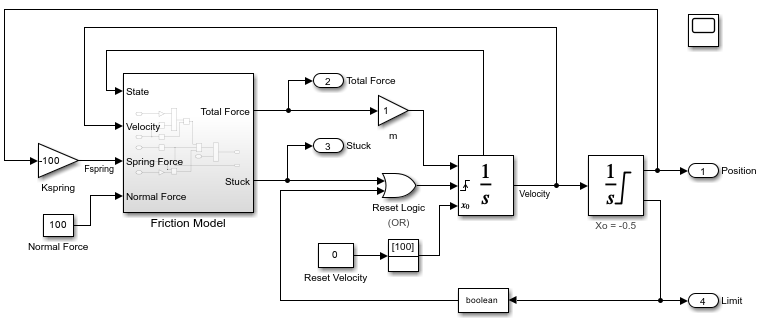
マス-バネ-ダンパー系におけるスティックスリップ摩擦とハード ストップのモデル化
この例では、ハード ストップとスティックスリップ動作による摩擦の変化をマス-バネ-ダンパー モデルに組み込む 1 つの方法を示します。

時相論理を使ったバンバン制御
この例では、Stateflow® を使用してボイラーのバンバン温度制御システムをモデル化する方法を示します。ボイラーのダイナミクスが Simulink® でモデル化されます。

アニメーションを使った倒立振子
この例では、Simulink® を使用して倒立振子システムをモデル化およびアニメーション化する方法を示します。倒立振子の重心はピボット点より上にあります。この位置を安定して維持するために、システムは振子が落下を開始するとピボット点を重心より下に移動する制御ロジックを実装します。倒立振子は制御手法のテストに使用される古典力学問題です。

二重バネ-マス系
この例では、強制関数が定期的に変化する二重バネ-マス系をモデル化する方法を示します。モデルは、プラントと推定器を表現するためにState-Spaceブロックを使用し、シミュレーション時に質量系をアニメーション化するためにLevel-2 MATLAB S-Functionブロックを使用します。センサーとアクチュエータは、左側の質量に接続されます。この例では、状態の推定と線形 2 次レギュレーター (LQR) 制御を使用します。
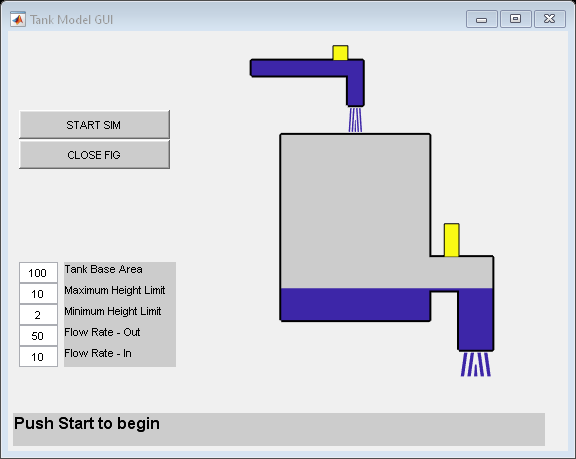
アニメーションを使った水槽の水量変化
この例では、水槽内の液体のダイナミクスをモデル化する方法を示します。このモデルでは、液体の流入と流出をシミュレートします。

可変伝達遅延の現象をもつシステムのシミュレーション
この例では、Simulink® を使用して可変伝達遅延の現象をモデル化する方法について、2 つの事例を示します。

フーコーの振子モデル
この例では、フーコーの振子のモデル化方法を示します。フーコーの振子は、フランスの物理学者レオン・フーコーが考えたものです。その目的は、地球の自転を証明することでした。地球は自転しているため、フーコーの振子の振動面は終日回転します。振動面が 1 周するのにかかる時間間隔 T は、地理緯度によって異なります。

Simulink 3D Animation によるフーコーの振子モデル
この例では、Simulink® 3D Animation™ 環境でフーコーの振子モデルをアニメーション化する方法を示します。モデル内の Latitude 定数値や MATLAB® ワークスペース内の他のパラメーターを変更することで、振子の位置を変更できます。

スティッフなモデルによる可変ステップ ソルバーの調査
この例では、フーコーの振子モデルの可変ステップ ソルバーの動作を示します。Simulink® ソルバー ode45、ode15s、ode23 および ode23t がテスト ケースとして使用されます。スティッフな微分方程式が、この問題を解くために使用されます。方程式のスティッフ性の厳密な定義は存在しません。数値的手法を使用してスティッフな方程式を解く場合、一部の数値的手法は不安定なため、ステップ サイズをかなり小さくしなければ、スティッフな問題に対する数値的に安定した解を得ることができません。スティッフな問題には、すぐに変化する要素と、ゆっくりと変化する要素が含まれていることがあります。

モデルのソルバー ヤコビ行列構造の探索
この例では、Simulink® を使用してソルバーのヤコビ スパース パターンと、ソルバーのヤコビ スパース パターンおよび物理システムのコンポーネント間の依存関係の間のつながりを探索する方法を示します。自由移動ベースに配置された 3 つのメトロノームの同期をモデル化する Simulink モデルが使用されます。

2 個の跳ねるボール: 適応ゼロクロッシング位置の使用
この例では、システムのダイナミクスに基づいて正しいゼロクロッシング位置アルゴリズムを選択する方法を示します。Zeno 動的システム、つまり強力なチャタリングのあるシステムの場合は、[設定] ペインを通じて適応ゼロクロッシング検出アルゴリズムを選択できます。

4 つの油圧シリンダーのシミュレーション
Simulink を使用して 4 つの油圧シリンダーをもつモデルを作成します。モデルには 1 つのポンプと 4 つのアクチュエータがあります。
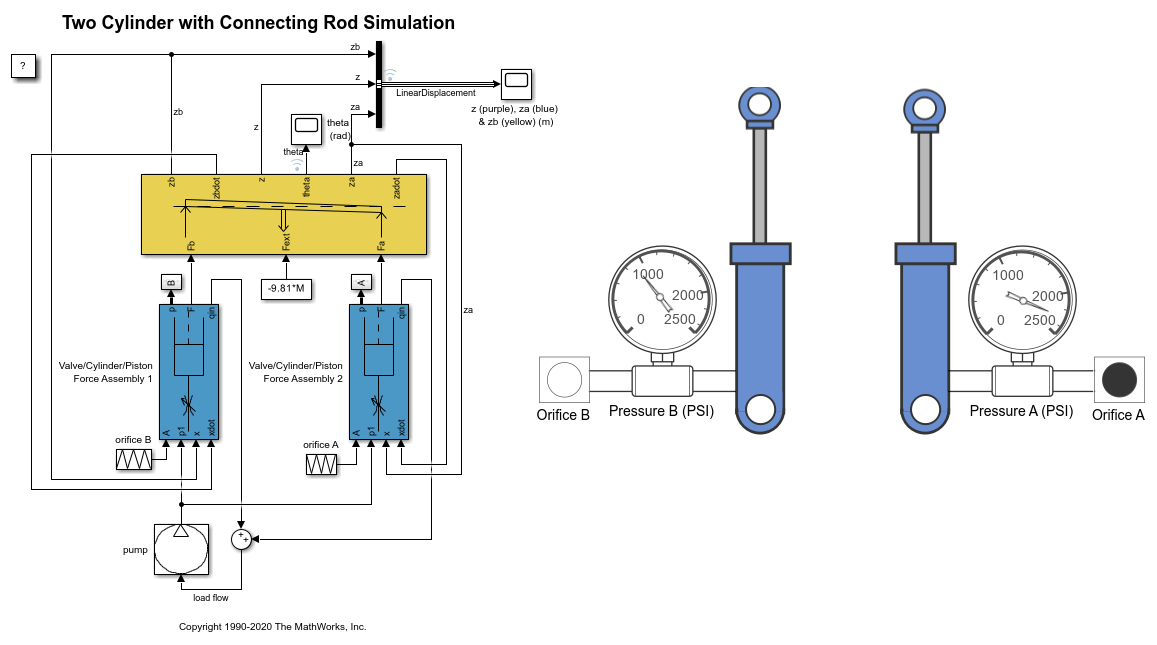
荷重制約をもつ 2 つのシリンダーのモデル
Simulink を使用して、2 つの油圧アクチュエータを相互に接続する、大きな質量を支える剛体棒をモデル化します。ピストンの力が荷重に直接かかるため、このモデルではバネは使用されません。

サイバーフィジカル システムのモデル化
可変速コンベヤー ベルトで伝達遅延をモデル化する

バネ-マス-ダンパー システムのパワー解析
マス-バネ ダンパー システムの機械動力を解析する。

ファン デル ポール振動子
この例では、Simulink® でファン デル ポール (VDP) の 2 階微分方程式をモデル化する方法を示します。動力学において、VDP 振動子は非保存系であり、非線形減衰を示します。振幅が大きい場合、振動子はエネルギーを散逸させます。振幅が小さい場合、振動子はエネルギーを生成します。この振動子は、次の 2 階微分方程式で表されます。
Collision Avoidance and Trajectory Tracking of an Autonomous Surface Vessel
Follow a pre-defined trajectory and avoid collisions.