Control Design
Simulink 環境でモデル化された制御システムを設計および解析するには、Simulink Control Design ソフトウェアの使用を検討してください。
Simulink Control Design で Simulink を拡張して、操作点を検出し、さまざまな操作条件で Simulink モデルの正確な線形化を計算できます。Simulink Control Design には、モデルを変更せずにシミュレーションベースの周波数応答を計算できるツールが用意されています。
Simulink Control Design には、Transfer Function ブロックや PID Controller ブロックなどの Simulink ブロックを調整するための方法がいくつか備わっています。これらの方法やツールを使用して、以下を実行できます。
PID Controller ブロックまたは PID Controller (2DOF) ブロックを含むフィードバック ループを自動的に調整する。
調整可能な Simulink ブロックを含む SISO フィードバック ループをグラフィカルにまたは自動的に調整する。
設定値追従、外乱の抑制、安定余裕など高位の設計目標を満たす任意の構造をもつ制御システムの Simulink モデルを調整する。
トピック
平衡化と線形化
- 定常状態の操作点の計算 (Simulink Control Design)
定常状態の操作点を取得するには、数値的な最適化手法を用いてモデルを平衡化するか、定常状態条件に達するまでモデルをシミュレートすることができます。 - 非線形モデルの線形化 (Simulink Control Design)
操作点の周りの小さい領域で有効な非線形システムの線形近似を取得します。 - 線形化ツールの選択 (Simulink Control Design)
Simulink Control Design ソフトウェアでは、ユーザー インターフェイス、関数、またはブロックを使用して、非線形モデルの線形解析を行うことができます。 - Simulink モデルのモデル操作点での線形化 (Simulink Control Design)
初期状態値と入力信号から構成されている操作点でモデルを線形化します。 - 平衡化された操作点での線形化 (Simulink Control Design)
指定された入力、出力または状態の制約を満たす操作点で Simulink モデルを線形化できます。
周波数応答の推定
- 周波数応答推定の基礎 (Simulink Control Design)
周波数応答は、正弦波入力に対するシステムの定常状態応答を表します。Simulink Control Design を使用して、モデルの周波数応答の推定や、物理プラントのオンライン推定の実行ができます。 - モデル線形化器を使用した周波数応答の推定 (Simulink Control Design)
手動で構成された sinestream 入力信号を使用して Simulink モデルの周波数応答を推定する。
PID 制御設計
- Simulink でのモデルベースの PID 調整の紹介 (Simulink Control Design)
PID 調整器を使用して、PID Controller ブロックまたは PID Controller (2DOF) ブロックを含む Simulink モデルで PID ゲインを対話的に調整する。 - Simulink でモデル化されたプラントの PID 自動調整 (Simulink Control Design)
PID 自動調整アルゴリズムを使用して、モデルの実行中に Simulink でモデル化されたプラントに対して調整を行う。
制御システムの調整
- Simulink での制御システムの調整 (Simulink Control Design)
コマンド ラインでsystuneまたはlooptuneを使用して、Simulink でモデル化された制御システムを自動的に調整する。
適応制御設計
- 極値探索制御 (Simulink Control Design)
不明なシステム ダイナミクスがある場合のコントローラー パラメーターの更新による目的関数の最大化。 - モデル規範形適応制御 (Simulink Control Design)
不確かさをもつ制御対象システムを特定の参照プラント モデルの動作に追従させる制御動作を計算する。
制御設計アプリケーション
- Thermal Modeling and Control Design for CPU Chip Cooling System (Control System Toolbox)
Create a CPU and heat sink thermal model, perform model order reduction, and design a controller for a cooling system.
- Create Heat Sink Finite Element Model and Export Data for State-Space Simulation (Control System Toolbox)
- Import Finite Element Model Data to Simulink (Control System Toolbox)
- Create Low-Order LPV Model of CPU and Heat Sink Model (Control System Toolbox)
- Tune PI Controller for Heat Sink Model (Control System Toolbox)
注目の例

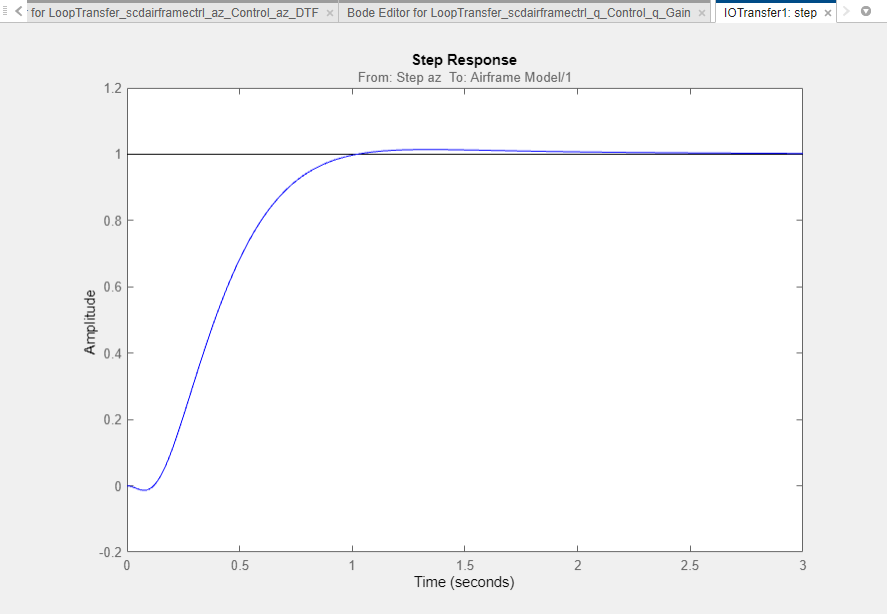
高迎角のピッチ モード制御の設計
この例では、Control System Toolbox™ と Simulink® Control Design™ を使用して Simulink を操作し、航空機のデジタル ピッチ制御を設計する方法を示しています。この例では、この航空機を最小限の作業負荷で高迎角で操作できるようにコントローラーを設計します。
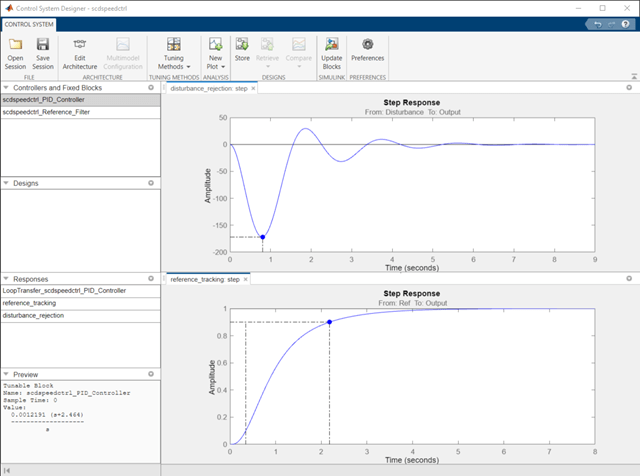
単ループのフィードバック/プレフィルターの補償器設計
フィードバック補償器を使用して単一ループ システムの閉ループ性能を調整した後、プレフィルターを使って基準信号の変化に対するシステム応答を調整します。
カスケード マルチループ フィードバック設計
カスケード マルチループ システムの補償器を設計するには、まず内側のループに対する補償器を調整してから、外側のループの補償器を調整します。

制御システム調整器を使用した制御システムの調整
Simulink でモデル化された MIMO マルチループ制御システムを、制御システム調整器アプリを使用して調整する。
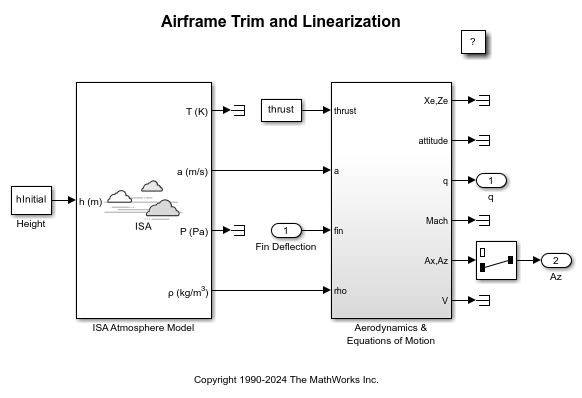
機体の平衡化と線形化
この例では、Simulink® Control Design™、Control System Toolbox™、および Aerospace Blockset™ を使用して機体モデルの平衡化と線形化を実行する方法を示します。
授業用リソース

Virtual Hardware and Labs for Controls
開/閉ループのフィードバック制御システムの構築、伝達関数の計算、位置解析の実行の概念について学習する。