衝突検出
衝突ジオメトリ メッシュ、衝突回避およびクリアランス
衝突ジオメトリは、ロボットとその環境によって占有される物理空間を定義します。ロボットのパーツまたは環境内の障害物を表すには、ボックス、円柱、球面、カスタム メッシュなどの衝突オブジェクトを作成します。checkCollision を使用して、軌跡の実行中に、マニピュレーター アームのさまざまなパーツの相互衝突 (自己衝突)、またはワールド内の障害物との衝突が発生するかどうかを判定します。関数は、衝突を予期して回避するための障害物クリアランスも出力します。
関数
ブロック
注目の例
新規
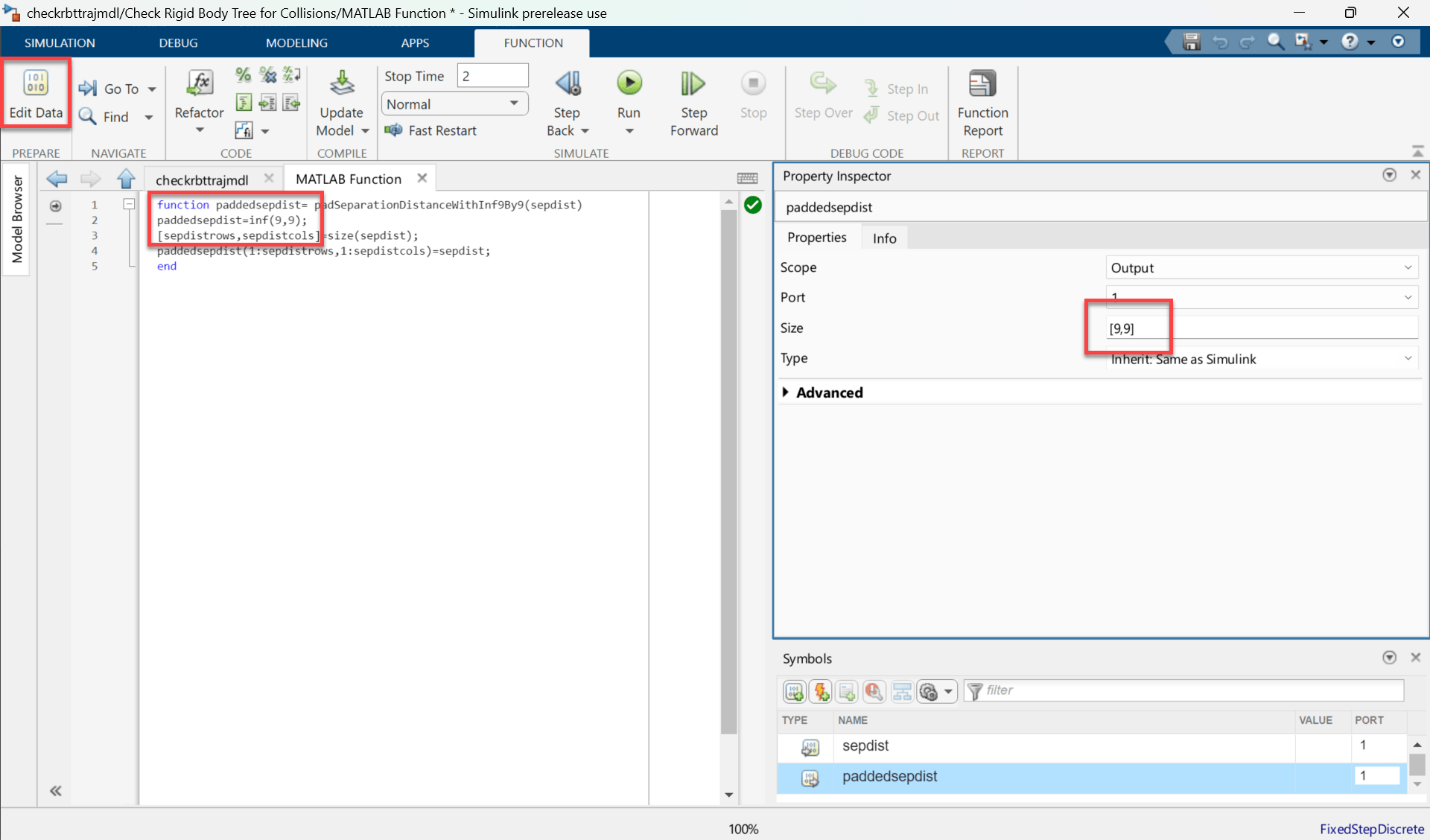
Check Rigid Body Tree Trajectories for Collisions in Simulink
Check self and world collisions of a rigid body tree given an input trajectory in Simulink® with dynamic world obstacles.

衝突メッシュを使用したマニピュレーターの自己衝突のチェック
ロボット モデルの URDF から衝突メッシュを使用して KUKA® IIWA-14 シリアル マニピュレーターの自己衝突をチェックする。

マニピュレーターの衝突チェック用の衝突データの取得
マニピュレーターの衝突チェック用の衝突データがある剛体ツリー モデルを取得する 3 通りの方法を確認する。

Reduce Motion Planning Times Using Capsule Approximation
Use capsule approximation on rigid bodies to speed up motion planning using RRT.