モーション プランニングとパス プランニング
マニピュレーター用の Rapidly Exploring Random Tree (RRT)、Covariant Hamiltonian Optimization for Motion Planning (CHOMP) アルゴリズム、モバイル ロボット用の Probabilistic Roadmap (PRM) などのカスタマイズ可能なプランナーを使用して、パスを計画します。Navigation Toolbox™ を活用して、カスタマイズ可能なモーション プランナーを設計します。
障害物を回避しながら、グローバル パスに沿って滑らかに移動する軌跡を生成します。
カテゴリ
- マニピュレーター プランニング
RRT および CHOMP を使用したマニピュレーターのモーション プランニングとパス プランニング
- モバイル ロボット プランニング
地図作成、位置推定、パス プランニング、パス追従
- 軌跡の生成
多項式、B スプライン、台形軌跡の生成
注目の例
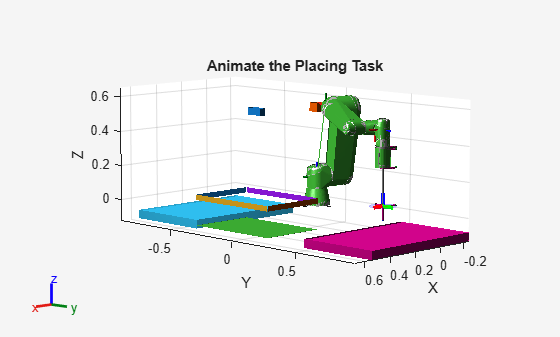
Design a Trajectory Planner for a Robotic Manipulator
Design a planner in Simulink that generates collision-free trajectories for sorting items in a bin picking system.

Pick-And-Place Workflow Using CHOMP for Manipulators
Use CHOMP to plan smooth and collision-free trajectories for a pick-and-place workflow.

差動駆動型ロボットのパス追従
単純追跡パス追従コントローラーを使用して、あらかじめ決められたパスに沿ってシミュレートされたロボットを駆動する。

Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.
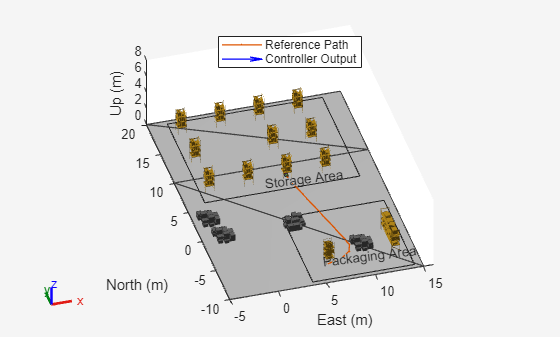
Plan Path in Warehouse Scenario with Unseen Obstacle Avoidance
Plan path in a warehouse scenario by avoiding unseen obstacles using TEB algorithm.

Simulate Path Following on Speedgoat Real-Time Target Machine
Perform real-time simulation of path following on Speedgoat real-time target machine.
授業用リソース

ロボット マニピュレーター
座標系の変換、DH パラメーター、順運動学/逆運動学を通じてロボット アームの動作の概念を学習する。