モバイル ロボット プランニング
地図作成、位置推定、パス プランニング、パス追従
これらのカテゴリに掲載されているアルゴリズムは、地図作成から計画と制御まで、モバイル ロボティクスのワークフロー全体で役立ちます。占有グリッドを使用して環境のマップを作成し、指定された環境におけるロボットのパス計画アルゴリズムを開発し、コントローラーを調整して一連のウェイポイントに追従させることができます。ロボットからの LiDAR センサー データに基づいて状態推定を行います。
注目の例

複雑度の異なる環境でのパス計画
Probabilistic Roadmap パス プランナーを使用して、与えられたマップ上の 2 つの位置間で障害物のないパスを計算する。
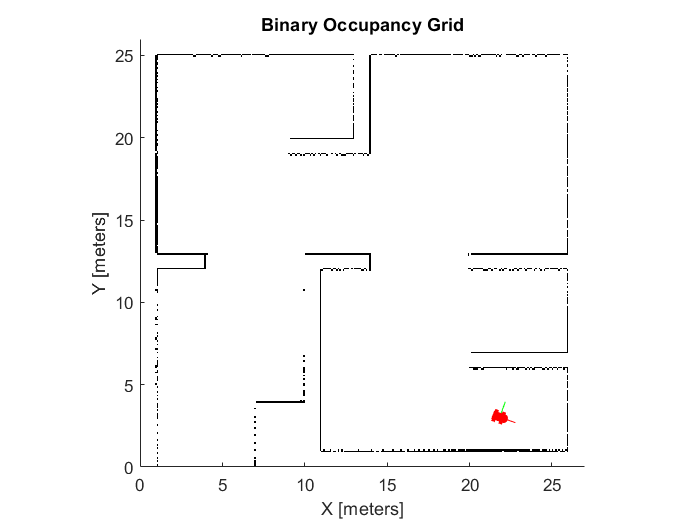
既知の姿勢を使用する地図作成
距離センサーの読み取り値とロボットの姿勢を使用して差動駆動型ロボットを駆動する環境のマップを作成する。