地図作成と位置推定
LiDAR スキャンによる地図作成、粒子フィルターによる位置推定
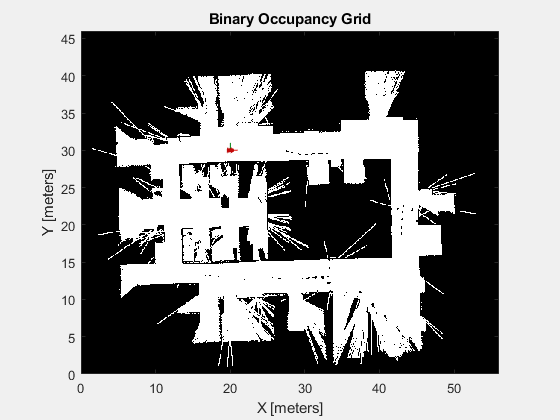
占有グリッドを使用して環境のマップを作成し、ロボットからの LiDAR センサー データを使用して、サンプリングベースの再帰ベイズ推定アルゴリズムを使用して位置推定を行います。
関数
トピック
地図作成
- 占有グリッド
占有グリッドの機能とマップ構造体の詳細
状態の推定
- 粒子フィルターのパラメーター
stateEstimatorPF粒子フィルターを使用するには、粒子数、粒子の初期位置、状態推定法などのパラメーターを指定しなければなりません。 - 粒子フィルター ワークフロー
粒子フィルターは、推定状態の事後分布を離散粒子によって近似する再帰的ベイズ状態推定器です。
注目の例
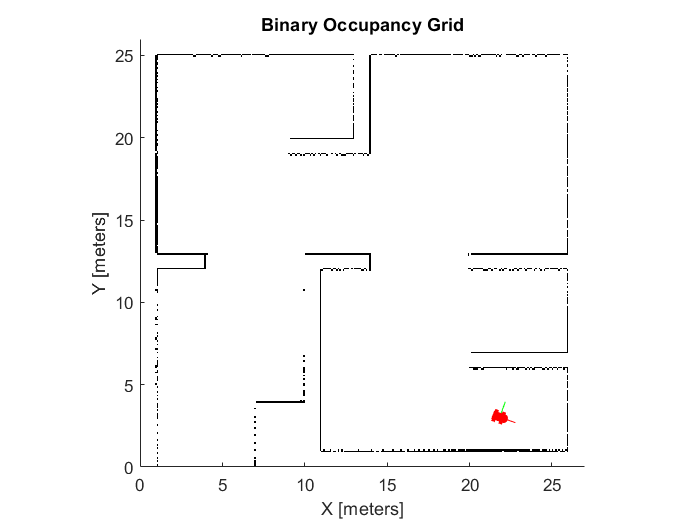
既知の姿勢を使用する地図作成
距離センサーの読み取り値とロボットの姿勢を使用して差動駆動型ロボットを駆動する環境のマップを作成する。
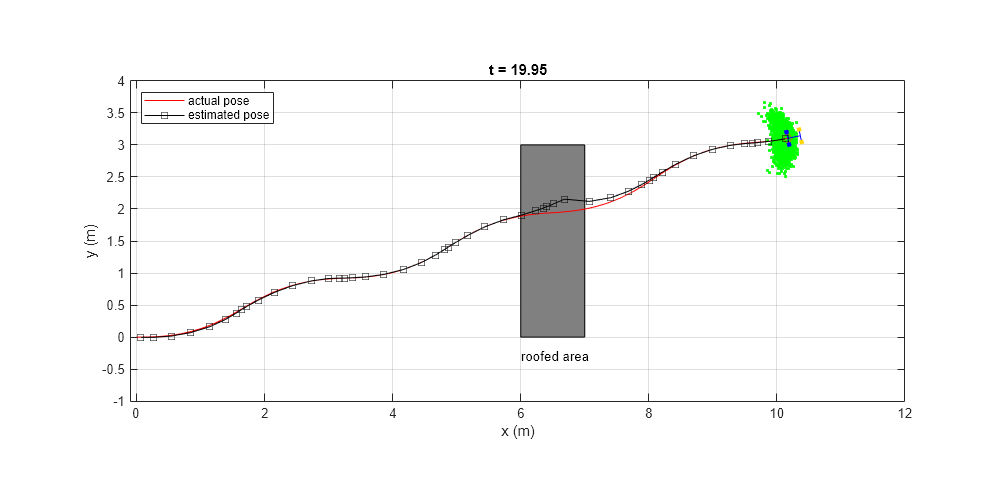
粒子フィルターを使用した自動車型ロボットの追跡
状態推定粒子フィルターを使用してノイズの影響を低減し、ロボットの姿勢をより正確に推定する。
モバイル ロボットの強化学習を使用した障害物の回避
DDPG ベースの強化学習を使用してモバイル ロボットの障害物回避手法を開発する。