collisionCylinder
円柱型の衝突ジオメトリを作成
説明
collisionCylinder は、ボディ固定座標系の z 軸と軸が揃った、ボディ固定座標系の原点を円柱の中心とする、円柱型の衝突ジオメトリを作成するために使用します。
作成
プロパティ
オブジェクト関数
checkCollision | 2 つのジオメトリが衝突しているかどうかをチェック |
convertToCollisionMesh | Convert collision primitive geometry into collision mesh geometry |
fitCollisionCapsule | Fit collision capsule around collision geometry |
show | 衝突ジオメトリの表示 |
例
原点を中心とする円柱型の衝突ジオメトリを作成します。この円柱は、長さが 4 メートル、半径が 1 メートルです。
rad = 1; len = 4; cyl = collisionCylinder(rad,len)
cyl =
collisionCylinder with properties:
Radius: 1
Length: 4
Pose: [4×4 double]
円柱を可視化します。
show(cyl)
title("Cylinder")
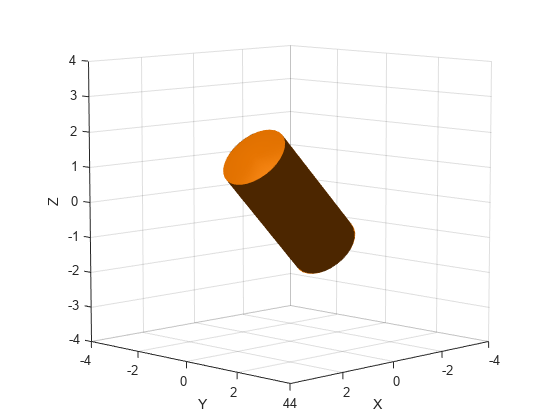
"y" 軸を中心とした ラジアンの時計回りの回転に対応する同次変換を作成します。円柱の姿勢を新しい行列に設定します。円柱を表示します。
ang = pi/4; mat = axang2tform([0 1 0 ang]); cyl.Pose = mat; show(cyl)