clearCollision
接続されたすべての衝突ジオメトリのクリア
説明
例
ロボット モデルを読み込み、衝突メッシュを変更します。既存の衝突メッシュをクリアし、簡易衝突オブジェクトのプリミティブ型を追加して、特定のコンフィギュレーションが競合しているかどうかを確認します。
ロボット モデルの読み込み
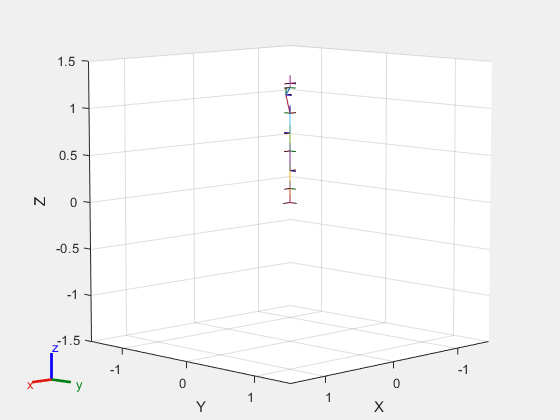
関数 loadrobot を使用して、事前構成済みのロボット モデルをワークスペースに読み込みます。このモデルには、既に各ボディに指定された衝突メッシュがあります。すべての剛体要素を反復し、既存の衝突メッシュをクリアします。既存のメッシュがなくなっていることを確認します。
robot = loadrobot("kukaIiwa7",DataFormat="column"); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,Collisions="on",Visuals="off");
衝突シリンダーの追加
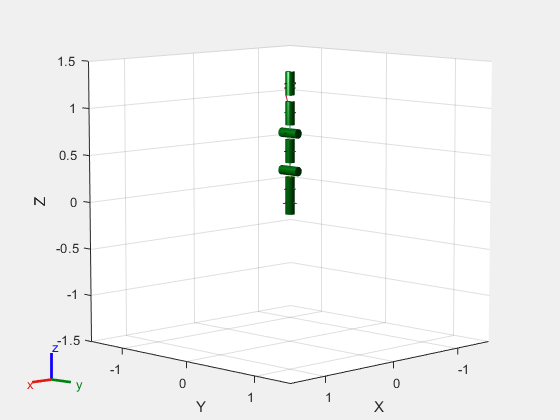
青の衝突シリンダーを各ボディに繰り返し追加し、透明度を不透明に設定します。この特定のモデルに対するボディの一部は、オーバーラップしてエンドエフェクタ (ボディ 10) と常に衝突するため、スキップします。
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i}, collisionObj, FaceColor=[0 0 1], FaceAlpha=1) end end show(robot,Collisions="on",Visuals="off");
衝突チェック
一連のランダムなコンフィギュレーションを生成します。ロボットが各コンフィギュレーションで競合しているかどうかを確認します。競合している各コンフィギュレーションを可視化します。
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config,SkippedSelfCollisions="parent"); if isColliding show(robot,config,Collisions="on",Visuals="off"); title("Collision Detected") else % Skip non-collisions. end end

入力引数
拡張機能
バージョン履歴
R2020b で導入