iopzplot
動的システムの入出力ペアの極-零点配置図をプロットする
構文
説明
iopzplot 関数は、動的システム モデルの入出力ペアの極-零点配置図をプロットします。プロットをカスタマイズするには、IOPZPlot オブジェクトを返し、ドット表記を使用して変更します。詳細については、コマンド ラインでの線形解析プロットのカスタマイズ (Control System Toolbox)を参照してください。
極と零点の位置を取得するには、iopzmap 関数を使用します。
iopzplot(___, は、plotoptions)plotoptions で指定されたプロット オプションを使用して極と零点をプロットします。plotoptions に指定する設定は、現在の MATLAB® セッションのプロット基本設定をオーバーライドします。plotoptions は、前述の構文の任意の入力引数の組み合わせで使用できます。
iopzplot(___, は、1 つ以上の名前と値の引数を使用して応答プロパティを指定します。たとえば、Name=Value)iopzplot(sys,MarkerSize=10) は、極と零点のマーカー サイズを 10 に設定します。 (R2026a 以降)
複数のシステムの応答をプロットする場合、指定した名前と値の引数はすべての応答に適用されます。
名前と値の引数 Color は、ColorSpec 引数を使用して指定された色をオーバーライドします。
iopzplot( は、parent,___)Figure や TiledChartLayout などの指定された親グラフィックス コンテナーに極と零点をプロットし、Parent プロパティを設定します。指定された開いている Figure にプロットを作成する場合、または App Designer でアプリを作成する場合に、この構文を使用します。
iopzp = iopzplot(___)
例
2 つの入力、2 つの出力の動的システムの極/零点配置図を作成します。
sys = rss(3,2,2); ip = iopzplot(sys);
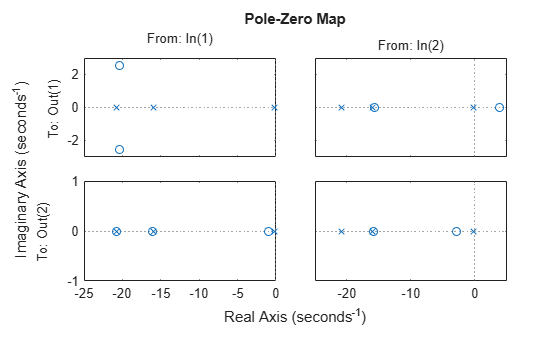
既定では、プロットは各 I/O ペアの極と零点をそれぞれの軸に表示します。チャート オブジェクトを変更して、すべての I/O を 1 つの軸に表示します。
ip.IOGrouping = "all";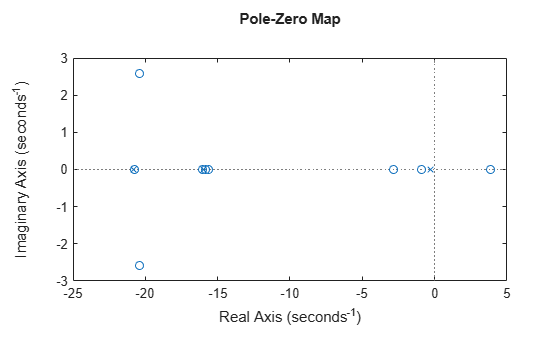
入出力データから推定された 6 次状態空間モデルの極と零点を表示します。プロット ハンドルを使用して、同定されたモデルの極と零点の位置の信頼区間を表示します。
load iddata1 sys = ssest(z1,6,ssestOptions('focus','simulation')); h = iopzplot(sys); showConfidence(h)
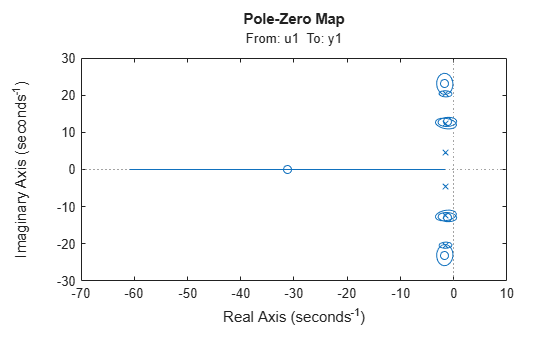
1-σ 信頼領域内に、複素零点と位置がオーバーラップしている複素共役極のペアが 1 組以上存在します。これはそれらの冗長性を示しています。したがって、より低次の (4 次) モデルの方が、与えられたデータに対してより堅牢である可能性があります。
sys2 = ssest(z1,4,ssestOptions('focus','simulation')); h = iopzplot(sys,sys2); showConfidence(h) legend('6th-order','4th-order') axis([-20, 10 -30 30])
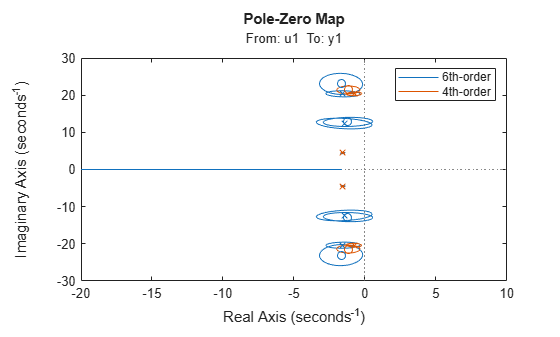
4 次モデル sys2 では、極-零点の位置の変動性が低減されています。
入力引数
名前と値の引数
出力引数
詳細
ヒント
iopzplotを使用して作成されたプロットは、string 配列または文字ベクトルの cell 配列として指定された複数行のタイトルやラベルをサポートしません。複数行のタイトルやラベルを指定するには、newline文字を含む単一の string を使用します。iopzplot(sys) title("first line" + newline + "second line");
バージョン履歴
R2012a で導入参考
iopzmap | pzplot | addResponse | showConfidence
トピック
- コマンド ラインでの線形解析プロットのカスタマイズ (Control System Toolbox)