入出力多項式モデル
多項式モデルでは、伝達関数の一般化概念を使用して、入力 u(t)、出力 y(t)、およびノイズ e(t) の関係を次の形式の式を使用して表現します。
A(q)、B(q)、F(q)、C(q) および D(q) は、時間シフト演算子 q-1 に関する多項式行列です。u(t) は入力、nk は入力遅延です。y(t) は出力、e(t) は外乱信号です。
各多項式は、独立した "次数"、つまり推定可能な係数の数をもちます。たとえば、A(q) の次数が 2 である場合、A 多項式の形式は A(q) = 1 + a1q-1 + a2q-2 になります。
実際には、すべての多項式が同時にアクティブになるわけではありません。ARX、ARMAX、出力誤差、Box-Jenkins などのよりシンプルな形式の多項式では、非定常外乱の処理やダイナミクスとノイズの完全に独立したパラメーター化の提供といった特定の目的に適したモデル構造が得られます。これらのモデル タイプの詳細については、What Are Polynomial Models?を参照してください。
アプリ
| System Identification | 測定データからの動的システムのモデルの同定 |
関数
トピック
多項式モデルの基礎
- What Are Polynomial Models?
Polynomial model structures including ARX, ARMAX, output-error, and Box-Jenkins. - Data Supported by Polynomial Models
Use time-domain and frequency-domain data to estimate discrete-time and continuous-time models.
多項式モデルの推定
- Preliminary Step – Estimating Model Orders and Input Delays
To estimate polynomial models, you must provide input delays and model orders. - Estimate Polynomial Models in the App
Import data into the app, specify model orders, delays and estimation options. - Estimate Polynomial Models at the Command Line
Specify model orders, delays, and estimation options. - Polynomial Sizes and Orders of Multi-Output Polynomial Models
Size of A, B, C, D, and F polynomials for multi-output models. - Estimate Models Using armax
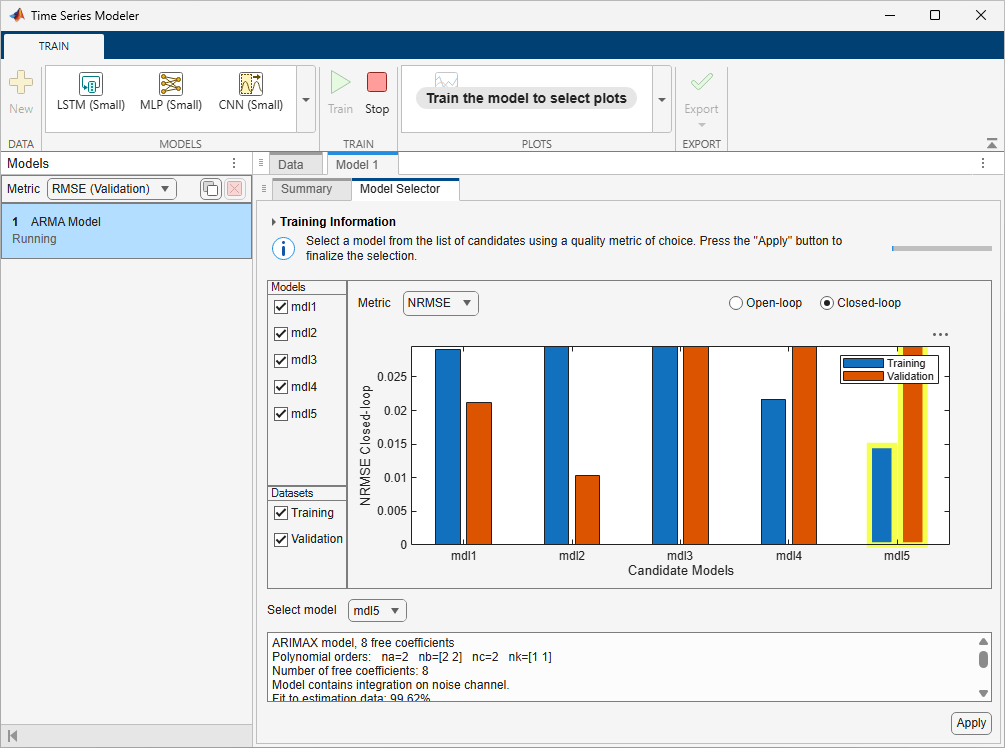
This example shows how to estimate a linear, polynomial model with an ARMAX structure for a three-input and single-output (MISO) system. - Estimate ARMA Model Using Time Series Modeler app
Train, compare, and export ARMA models using the Time Series app.
多項式モデルのオプションの設定
- Specifying Initial States for Iterative Estimation Algorithms
Specify initial conditions of polynomial models for iterative estimation algorithms. - Polynomial Model Estimation Algorithms
Choose between the ARX and IV algorithms for ARX and AR model estimation.
注目の例

複素数データを使用したスペクトル推定 - Marple のテスト ケース
この例では、時系列データでスペクトル推定を実行する方法を説明します。ここでは、Marple のテスト ケースを使用します (The complex data in L. Marple: S.L. Marple, Jr, Digital Spectral Analysis with Applications, Prentice-Hall, Englewood Cliffs, NJ 1987)。

Picking Instrumental Variables for System Identification
Illustration of the meaning and choice of instrumental variables (IVs) for system identification.
Predict Battery State-Of-Charge Using Time Series Modeler App
Train a multi-input single output autoregressive integrated moving average with extra input (ARIMAX) model using the Time Series Modeler app. You can use the workflow in this example to train autoregressive moving average (ARMA) models with different structures and training options.