このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
cosimulationConfiguration
説明
cosimulationConfiguration オブジェクトは、指定された HDL モジュールの HDL Cosimulation ブロックまたは System object™ の作成を制御します。
作成
構文
説明
cosimObj = cosimulationConfiguration(HDLSimulator,SubWorkflow,HDLTopLevelName)HDLSimulator、SubWorkflow、および HDLTopLevelName 値を持つ cosimulationConfiguration オブジェクトを作成します。
このワークフローは、HDL Cosimulation ブロックまたは hdlverifier.HDLCosimulation System object を作成するために コシミュレーション ウィザード を使用する代わりに使用するコマンドラインです。
cosimObj = cosimulationConfiguration(MATfile)cosimulationConfiguration オブジェクトを作成します。
プロパティ
オブジェクト関数
portInterface | ポートの仕様の表示 |
runWorkflow | 協調シミュレーションワークフローを実行し、必要な成果物を生成する |
specifyClock | クロックポートをコシミュレーションブロックまたはSystem objectに割り当てる |
specifyInput | HDL入力ポートをコシミュレーションブロックまたはSystem objectに割り当てる |
specifyOutput | HDL出力ポートをコシミュレーションブロックまたはSystem objectに割り当てる |
specifyReset | リセットポートをコシミュレーションブロックまたはSystem objectに割り当てる |
specifyUnused | HDLポートを未使用ポートとしてラベル付けする |
例
この例では、コマンドライン インターフェイスを使用して Simulink ® でレイズド コサイン フィルターをコシミュレートする方法を示します。これは、Simulink HDL コシミュレーション入門 と同じワークフローに従ってコシミュレーション成果物を生成しますが、コシミュレーションウィザードの代わりにコマンド ラインを使用します。
コシミュレーションワークフローを構成する
コシミュレーション構成オブジェクトを作成します。
c = cosimulationConfiguration('ModelSim','Simulink','rcosflt_rtl');
HDL ファイルを設定します。
c.HDLFiles = {'./rcosflt_rtl.v','Verilog'};
filter_out ポートを符号付き固定小数点データ型の出力として設定し、小数部の長さを 29 に設定します。
specifyOutput(c,'filter_out',Datatype='Fixedpoint',Signed=true,FractionLength=29)
クロックの周期を 20 ns に設定し、リセット期間を 15 ns に設定します。
specifyClock(c,'clk',Period=20) specifyReset(c,'reset',Duration=15)
ポート テーブルを表示します。出力、クロック、リセット属性に対して行われた設定が反映されます。その他の設計ポートはデフォルトの属性を取得します。
portInterface(c);
----- Input Data Ports -----
0×1 empty table
Name
____
----- Output Data Ports -----
2×5 table
Name SampleTime DataType Signed FractionLength
_____________________________ __________ ______________ ______ ______________
{'default_output_definition'} 1 {'Inherit' } false 0
{'filter_out' } 1 {'Fixedpoint'} true 29
----- Clock Ports -----
2×3 table
Name Edge Period
____________________________ __________ ______
{'default_clock_definition'} {'Rising'} 10
{'clk' } {'Rising'} 20
----- Reset Ports -----
2×3 table
Name InitialValue Duration
____________________________ ____________ ________
{'default_reset_definition'} 1 8
{'reset' } 1 15
----- Unused Ports -----
0×1 empty table
Name
____
HDL Cosimulation ブロックを生成する
ワークフローを実行して、HDL Cosimulation ブロックと付随するファイルを生成します。
runWorkflow(c);
-------------------- Step 1------------------
Select the type of cosimulation you want to do.If the HDL simulator executable you want to use is not on the system path in your environment you must specify its location.
-------------------- Step 2------------------
Add all VHDL, Verilog, and/or script files to be used in cosimulation to the following table. If the file type cannot be automatically detected or the detection result is incorrect, specify the correct file type in the table. If possible, we will determine the compilation order automatically using HDL simulator provided functionality. Then the HDL files can be added in any order.
-------------------- Step 3------------------
HDL Verifier has automatically generated the following HDL compilation commands. You can customize these commands with optional parameters as specified in the HDL simulator documentation but they are sufficient as shown to compile your HDL code for cosimulation. The HDL files will be compiled when you click Next.
Compiling HDL design. Please wait ...
###Compiling HDL design
Reading pref.tcl
# 2024.2
# do hdlverifier_compile_design.do
# ** Warning: (vlib-34) Library already exists at "work".
# Errors: 0, Warnings: 1
# Loading project compile_project
# .
# QuestaSim-64 vlog 2024.2 Compiler 2024.05 May 20 2024
# Start time: 14:09:05 on Aug 29,2025
# vlog -work work -vopt C:/Users/user/OneDrive - MathWorks/Documents/MATLAB/ExampleManager/user.Bdoc25b.j2987061/hdlverifier-ex80882452/rcosflt_rtl.v
# -- Compiling module rcosflt_rtl
#
# Top level modules:
# rcosflt_rtl
# End time: 14:09:07 on Aug 29,2025, Elapsed time: 0:00:02
# Errors: 0, Warnings: 0
# Compile of rcosflt_rtl.v was successful.
# All compile dependencies have been resolved.vlog -work work -vopt -stats=none {C:/Users/user/OneDrive - MathWorks/Documents/MATLAB/ExampleManager/user.Bdoc25b.j2987061/hdlverifier-ex80882452/rcosflt_rtl.v}
# reading E:/share/apps/HDLTools/ModelSim/questasim-2024.2/Windows/win64/../modelsim.ini
# QuestaSim-64 vlog 2024.2 Compiler 2024.05 May 20 2024
# -- Compiling module rcosflt_rtl
#
# Top level modules:
# rcosflt_rtl
...done
-------------------- Step 4------------------
Use 'Shared Memory' communication method if your firewall policy does not allow TCP/IP socket communication.
Elaborating and Loading HDL simulation image. Please wait ...
Waiting for HDL Simulator to startup ...
120 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
119 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
118 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
117 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
116 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
115 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
114 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
113 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
Waiting for HDL Simulator to startup ...
112 seconds to time-out ...
To stop this process, press Ctrl+C in MATLAB console.
...done
-------------------- Step 5------------------
Specify all input and output port types. Input signals that are identified as 'Clock' and 'Reset' signals will be forced in the HDL simulator through Tcl commands. You can specify the timing parameters for forced 'Clock' and 'Reset' signals in the next step. If you want to drive your HDL clock and reset signals with Simulink signals, mark them as 'Input'.
-------------------- Step 6------------------
Set the sample time and data type for each output port. You can specify the sample time as -1, which means that it will be inherited via back propagation in the Simulink model. Back propagation may fail in certain circumstances; click Help for details.
-------------------- Step 7------------------
Set clock and reset parameters here. The time in these tables refers to time in the HDL simulator.
Please wait while generating waveforms.
...done
-------------------- Step 8------------------
The diagram below shows the current settings for forced 'Clock' and 'Reset' signals. The red line represents the time in the HDL simulation at which MATLAB/Simulink will start (i.e. cosimulation will start).
To change the MATLAB/Simulink start time relative to the HDL simulation time, enter the new start time below. To avoid a race condition, make sure the start time does not coincide with the active edge of any clock signal. You can do so by moving the start time or by changing the clock active edge in the previous step (click Back).
-------------------- Step 9------------------
When you click Finish, the Cosimulation Wizard performs the following actions:
- Creates and opens a new Simulink model containing an HDL Cosimulation block configured to your specifications.
- Generates the scripts to compile your HDL code and launch the HDL simulator according
to the choices you made with this assistant.
- (If you check the box below) Configures the HDL Cosimulation block to assist you in setting the timescale
when you cosimulate the block for the first time.
- (If you uncheck the box below) The timescale is set to the default setting of 1 Simulink second = 1 second in the HDL simulator
or you may change it below.
Generating blocks ... Please wait.
Warning: The model name 'hdlverifier_wizard_rcosflt_rtl' is shadowing another
name in the MATLAB workspace or path. Type "which -all
hdlverifier_wizard_rcosflt_rtl" at the command line to find the other uses of
this name. You should change the name of the model to avoid problems.
...done
ワークフローはステップを実行し、hdlverifier_wizard_rcosflt_rtl.slx という名前の Simulink モデルを生成します。このモデルには、HDL Cosimulation ブロックと、コンパイルおよび HDL シミュレータとの通信用の 2 つの追加ブロックが含まれています。
提供されたテストベンチ モデルを開きます。
open_system('rcosflt_tb.slx')
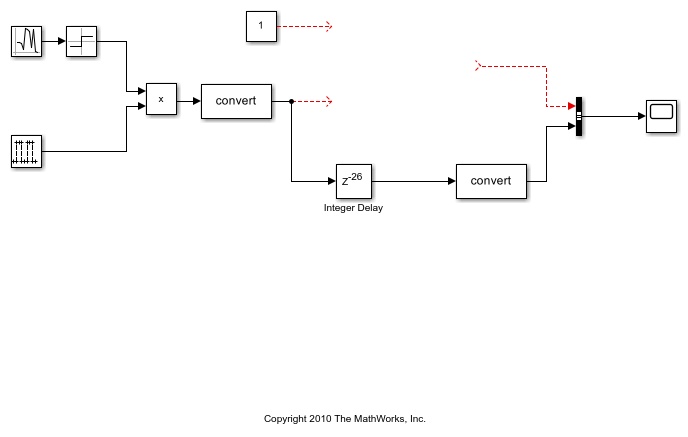
生成された HDL Cosimulation ブロックをキャンバスにドラッグし、その入力と出力をテストベンチに接続します。モデルは次の図のようになります。

コシミュレーションを実行してHDL設計を検証する
Launch HDL Simulator というラベルの付いたブロックをダブルクリックして、HDL シミュレータを起動します。
HDL シミュレータの準備ができたら、Simulink に戻り、シミュレーションを開始します。
タイムスケールを決定します。
AutoTimeScaleプロパティはシミュレーションの開始時にタイムスケールを自動的に決定するように設定されているため、HDL Verifier はシミュレーションを開始する代わりに、タイムスケールの詳細グラフィカル インターフェイスを起動します。HDL シミュレータと Simulink はどちらもfilter_inポートとfilter_outポートを 1 秒ごとにサンプリングします。ただし、HDL シミュレータでのサンプル時間はクロック周期 (20 ns) と同じである必要があります。/rcosflt_rtl/clkの Simulink サンプル時間を 1 (秒) に変更し、Enter を押します。その後、ウィザードはテーブルを更新します。次の図は新しいタイムスケールを示しています。Simulink の 1 秒は、HDL シミュレータの 2e-008 秒に相当します。

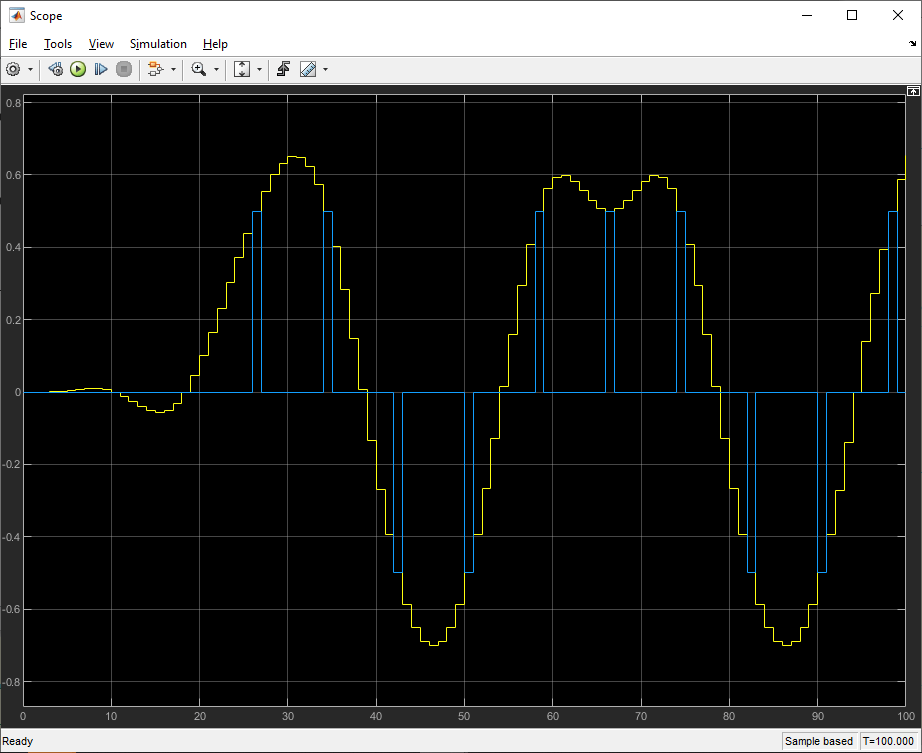
4. OK をクリックして、[タイムスケールの詳細] ダイアログ ボックスを閉じます。Simulink シミュレーションを再起動し、テストベンチ モデルのスコープからの結果を確認します。
スコープには、レイズド コサイン フィルターへの入力の遅延バージョンとそのフィルターの出力の両方が表示されます。このフィルタの出力を直接サンプリングすると、シンボル間干渉は発生しません。
制限
MATLAB リリースで生成した
.matファイルは、他のリリースでも動作することは保証されません。異なる MATLAB リリースの場合は、デザインに必要なカスタマイズを使用して コシミュレーション ウィザード ワークフローを完了まで実行し、.matファイルを再生成します。