自動操縦ハードウェア インターフェイス
PX4 および ArduPilot のソフトウェアを実行する自動操縦 (Pixhawk® Cube Orange や 6c など) 向けに、飛行制御アルゴリズムを生成し、展開します。ソフトウェアインザループ (SITL) およびハードウェアインザループ (HITL) のシミュレーションを実行し、飛行制御アルゴリズムを検証します。Micro Air Vehicle Link (MAVLink) 通信プロトコルを使用し、自動操縦ハードウェアと通信します。サポートされている自動操縦の完全なリストについては、サポートされている PX4 Autopilotを参照してください。
カテゴリ
- UAV Toolbox Support Package for PX4 Autopilots
UAV Toolbox を使用して PX4 Autopilot の周辺装置にアクセスし、Embedded Coder® を使用して飛行制御アルゴリズムを自動的に構築および展開する
- UAV Toolbox Support Package for ArduPilot Autopilots
UAV Toolbox を使用して ArduPilot Autopilot の周辺装置にアクセスし、Embedded Coder を使用して飛行制御アルゴリズムを自動的に構築および展開する
- MAVLink のサポート
Micro Air Vehicle Link 通信プロトコルのダイアレクトとメッセージ
注目の例
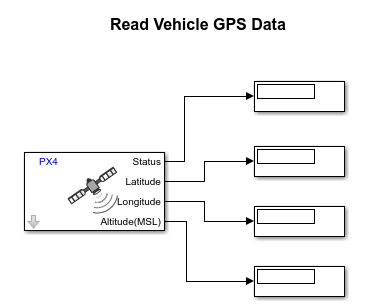
Read GPS Data from PX4 Autopilot
Read GPS data from PX4 autopilot in Simulink using GPS block.
Design and Tune Quadcopter Position Controller for PX4 Autopilot
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller for a quadcopter.

Receive Mission and Flight Parameter Data in Simulink Using MAVLink Microservices
Implement MAVLink Microservices in Simulink to receive mission and flight parameter data from QGroundControl.

Design Quadrotor Position and Attitude Controllers for ArduCopter
Use the UAV Toolbox Support Package for ArduPilot® Autopilots to design position and attitude controller for ArduCopter in Simulink®. This example is designed to run with the ArduPilot Host Target, allowing you to perform Software-in-the-Loop (SITL) simulation.
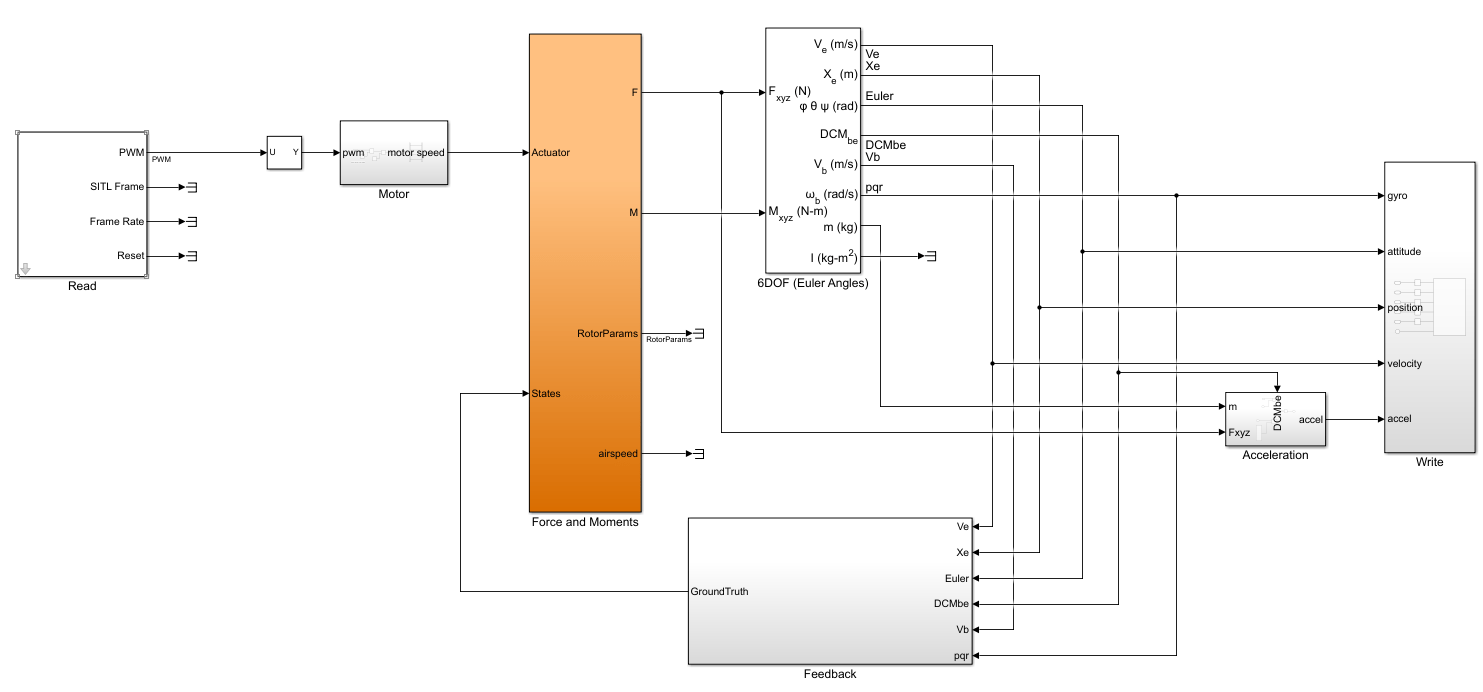
Run ArduPilot Software-in-the-Loop Simulation with Quadcopter Plant in Simulink
Verify a quadcopter controller design by using Software-in-the-Loop (SITL) simulation and simulating the quadcopter plant model in Simulink.