Image
(削除予定) イメージ メッセージの作成
Image オブジェクトは将来のリリースで削除されます。関数 rosmessage を使用して ROS メッセージを作成する場合は、名前と値の引数 Dataformat を "struct" として指定して、メッセージ構造体形式を使用します。関数 rosReadImage と関数 rosWriteImage を使用して、それぞれ ROS メッセージからイメージ データを読み書きできます。詳細については、ROS メッセージ構造体の関数を参照してください。
説明
Image オブジェクトは、ROS での sensor_msgs/Image メッセージ タイプの実装です。このオブジェクトには、メッセージに関するイメージとメタ情報が格納されています。空白の Image メッセージを作成してからデータを入力するか、ROS ネットワーク経由でイメージ メッセージをサブスクライブすることができます。イメージを MATLAB® イメージに変換するには、関数 readImage を使用します。
作成
説明
msg = rosmessage('sensor_msgs/Image') は、空の Image オブジェクトを作成します。イメージ データを指定するには、msg.Data プロパティを使用します。rossubscriber を使用して、ROS ネットワークからこれらのイメージのメッセージを取得することもできます。
プロパティ
オブジェクト関数
readImage | (削除予定) ROS イメージ データを MATLAB イメージに変換 |
writeImage | (To be removed) Write MATLAB image to ROS image message |
例
サンプルの ROS Image メッセージを MATLAB イメージに変換して、その読み取りと書き込みを行います。次に、MATLAB® イメージを ROS メッセージに変換します。
サンプルの ROS メッセージを読み込み、イメージ メッセージ データを検査します。img オブジェクトは、サンプルの ROS Image メッセージ オブジェクトです。
exampleHelperROSLoadMessages img
img =
ROS Image message with properties:
MessageType: 'sensor_msgs/Image'
Header: [1×1 Header]
Height: 480
Width: 640
Encoding: 'rgb8'
IsBigendian: 0
Step: 1920
Data: [921600×1 uint8]
Use showdetails to show the contents of the message
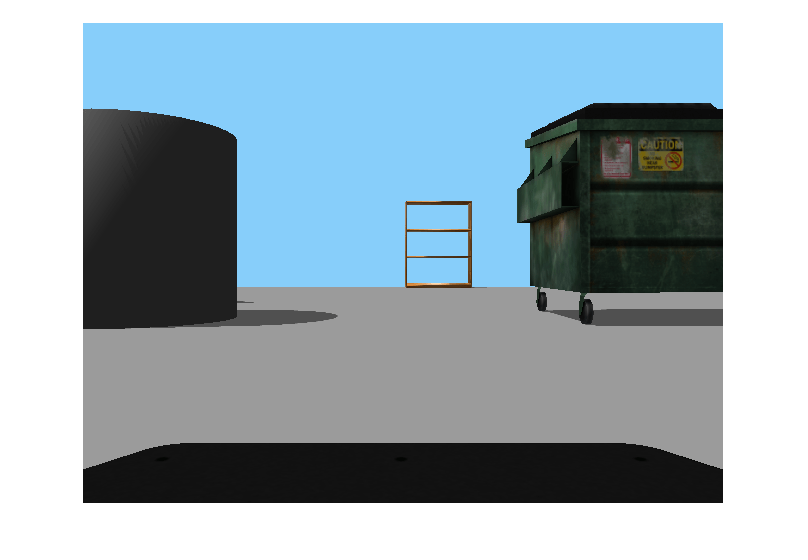
readImage を使用して Image メッセージから MATLAB イメージを作成し、表示します。
I = readImage(img); imshow(I)
MATLAB イメージから ROS Image メッセージを作成します。
imgMsg = rosmessage('sensor_msgs/Image'); imgMsg.Encoding = 'rgb8'; % Specifies Image Encoding Type writeImage(imgMsg,I) imgMsg
imgMsg =
ROS Image message with properties:
MessageType: 'sensor_msgs/Image'
Header: [1×1 Header]
Height: 480
Width: 640
Encoding: 'rgb8'
IsBigendian: 0
Step: 1920
Data: [921600×1 uint8]
Use showdetails to show the contents of the message
msg = rosmessage('sensor_msgs/Image')msg =
ROS Image message with properties:
MessageType: 'sensor_msgs/Image'
Header: [1×1 Header]
Height: 0
Width: 0
Encoding: ''
IsBigendian: 0
Step: 0
Data: [0×1 uint8]
Use showdetails to show the contents of the message