位置推定と姿勢推定
位置推定と姿勢推定のアルゴリズムを使用して、環境内でのビークルの向きを決定します。慣性センサー フュージョンは、フィルターを使用して IMU、GPS などのセンサー読み取り値を改善し、組み合わせます。モンテカルロ位置推定、スキャン マッチングなどの位置推定アルゴリズムは、距離センサーまたは LiDAR の読み取り値を使用して、既知のマップでの姿勢を推定します。姿勢グラフは推定姿勢を追跡し、エッジの制約およびループ閉じ込みに基づいて最適化することができます。
特定のセンサーをモデル化する場合は、センサー モデルを参照してください。
自己位置推定と環境地図作成の同時実行については、SLAMを参照してください。
カテゴリ
- 慣性センサー フュージョン
IMU と GPS による慣性ナビゲーション、センサー フュージョン、カスタム フィルター調整
- 位置推定アルゴリズム
粒子フィルター、スキャン マッチング、モンテカルロ位置推定、姿勢グラフ、オドメトリ
注目の例

慣性ナビゲーションの IMU と GPS フュージョン
この例では、無人航空機 (UAV) またはクワッドコプターに適した IMU と GPS のフュージョン アルゴリズムを作成する方法を示します。

Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. In this example, you:

センサー フュージョンを使用した電話の向きの推定
MATLAB® Mobile™ は、Apple または Android® のモバイル デバイスの加速度計、ジャイロスコープ、および磁力計からのセンサー データをレポートします。各センサーからの生データまたは融合した向きのデータを取得できます。この例では、電話からの融合した向きのデータをahrsfilterオブジェクトからの向きの推定と比較する方法を示します。
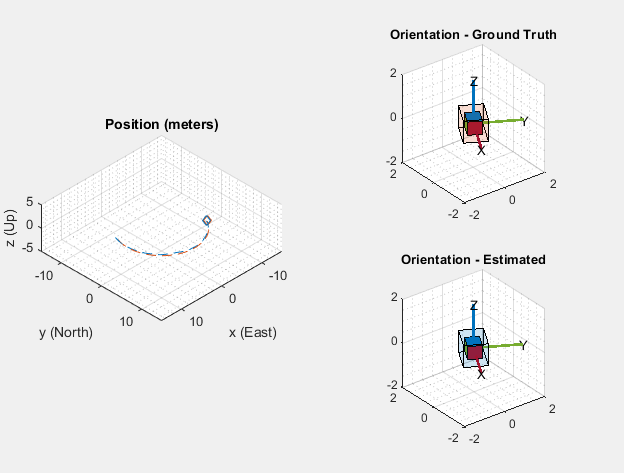
地上ビークルの位置と向きの推定
この例では、慣性計測ユニット (IMU) と全地球測位システム (GPS) 受信機からのデータを融合させて、地上ビークルの位置と向きを推定する方法を説明します。

Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

姿勢グラフを使用した 3 次元ビジュアル オドメトリの軌跡におけるドリフトの削減
この例では、3 次元姿勢グラフの最適化を使用して単眼カメラの推定軌跡 (位置と向き) におけるドリフトを減らす方法を説明します。ビジュアル オドメトリでは、カメラの現在のグローバルな姿勢 (現在のフレーム) を推定します。3 次元の点の三角形分割におけるマッチングが不適切であるか、誤差があることが原因で、ロボットの軌跡がグラウンド トゥルースからドリフトすることがよくあります。ループ閉じ込み検出と姿勢グラフの最適化により、このドリフトが減って誤差が補正されます。

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.