姿勢グラフを使用した 3 次元ビジュアル オドメトリの軌跡におけるドリフトの削減
この例では、3 次元姿勢グラフの最適化を使用して単眼カメラの推定軌跡 (位置と向き) におけるドリフトを減らす方法を説明します。ビジュアル オドメトリでは、カメラの現在のグローバルな姿勢 (現在のフレーム) を推定します。3 次元の点の三角形分割におけるマッチングが不適切であるか、誤差があることが原因で、ロボットの軌跡がグラウンド トゥルースからドリフトすることがよくあります。ループ閉じ込み検出と姿勢グラフの最適化により、このドリフトが減って誤差が補正されます。
姿勢グラフを最適化するための推定姿勢の読み込み
推定カメラ姿勢とループ閉じ込みエッジを読み込みます。推定カメラ姿勢はビジュアル オドメトリを使用して計算されます。ループ閉じ込みエッジは、現在のシーンを認識した前のフレームを検出して現在のフレームとループ閉じ込み候補の間の相対姿勢を推定することで計算されます。カメラ フレームは [1] からサンプリングされます。
% Estimated poses load('estimatedpose.mat'); % Loopclosure edge load('loopedge.mat'); % Groundtruth camera locations load('groundtruthlocations.mat');
3 次元姿勢グラフの作成
空の姿勢グラフを作成します。
pg3D = poseGraph3D;
相対姿勢を定義するエッジと姿勢グラフの情報行列を使用して、姿勢グラフにノードを追加します。変換として与えられている推定姿勢を、[x y theta qw qx qy qz] ベクトルとしての相対姿勢に変換します。各姿勢の情報行列には単位行列が使用されます。
len = size(estimatedPose,2); informationmatrix = [1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 1 0 1]; % Insert relative poses between all successive frames for k = 2:len % Relative pose between current and previous frame relativePose = estimatedPose{k-1}/estimatedPose{k}; % Relative orientation represented in quaternions relativeQuat = tform2quat(relativePose); % Relative pose as [x y theta qw qx qy qz] relativePose = [tform2trvec(relativePose),relativeQuat]; % Add pose to pose graph addRelativePose(pg3D,relativePose,informationmatrix); end
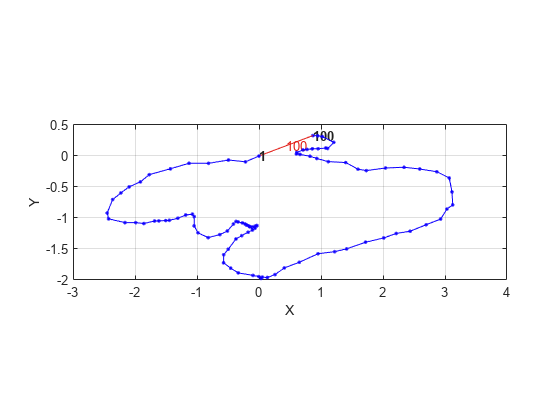
ループ閉じ込みエッジを追加します。このエッジは、現在のフレームから前のフレームへの既存の 2 つのノード間に追加します。
% Convert pose from transformation to pose vector. relativeQuat = tform2quat(loopedge); relativePose = [tform2trvec(loopedge),relativeQuat]; % Loop candidate loopcandidateframeid = 1; % Current frame currentframeid = 100; addRelativePose(pg3D,relativePose,informationmatrix,... loopcandidateframeid,currentframeid); figure show(pg3D);
姿勢グラフを最適化します。エッジの制約に基づいてノードが調整され、姿勢グラフ全体が改善されます。ドリフトの変化を確認するには、推定姿勢と新たに最適化された姿勢をグラウンド トゥルースに対してプロットします。
% Pose graph optimization optimizedPosegraph = optimizePoseGraph(pg3D); optimizedposes = nodes(optimizedPosegraph); % Camera trajectory plots figure estimatedposes = nodes(pg3D); plot3(estimatedposes(:,1),estimatedposes(:,2),estimatedposes(:,3),'r'); hold on plot3(groundtruthlocations(:,1),groundtruthlocations(:,2),groundtruthlocations(:,3),'g'); plot3(optimizedposes(:,1),optimizedposes(:,2),optimizedposes(:,3),'b'); hold off legend('Estimated pose graph','Ground truth pose graph', 'Optimized pose graph'); view(-20.8,-56.4);

参考文献
[1] Galvez-López, D., and J. D. Tardós. "Bags of Binary Words for Fast Place Recognition in Image Sequences." "IEEE Transactions on Robotics." Vol. 28, No. 5, 2012, pp. 1188-1197.