位置推定アルゴリズム
モンテカルロ位置推定、スキャン マッチングなどの位置推定アルゴリズムは、距離センサーまたは LiDAR の読み取り値を使用して、既知のマップでの姿勢を推定します。姿勢グラフは推定姿勢を追跡し、エッジの制約およびループ閉じ込みに基づいて最適化することができます。自己位置推定と環境地図作成の同時実行については、SLAMを参照してください。
関数
トピック
- Compose a Series of Laser Scans with Pose Changes
Use the
matchScansfunction to compute the pose difference between a series of laser scans. - Minimize Search Range in Grid-based Lidar Scan Matching Using IMU
This example shows how to use an inertial measurement unit (IMU) to minimize the search range of the rotation angle for scan matching algorithms.
- モンテカルロ位置推定アルゴリズム
モンテカルロ位置推定 (MCL) アルゴリズムは、ロボットの位置と向きを推定するために使用されます。
- 粒子フィルター ワークフロー
粒子フィルターは、推定状態の事後分布を離散粒子によって近似する再帰的ベイズ状態推定器です。
- 粒子フィルターのパラメーター
stateEstimatorPF(Robotics System Toolbox) 粒子フィルターを使用するには、粒子数、粒子の初期位置、状態推定法などのパラメーターを指定しなければなりません。
注目の例

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.

Factor Graph-Based Pedestrian Localization with IMU and GPS Sensors
Estimate the position of a pedestrian using logged sensor data from an inertial measurement unit (IMU) and Global Positioning System (GPS) receiver and a factor graph.

Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.

Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Localize TurtleBot Using Monte Carlo Localization Algorithm
Apply the Monte Carlo Localization algorithm on a TurtleBot® robot in a simulated Gazebo® environment.

姿勢グラフを使用した 3 次元ビジュアル オドメトリの軌跡におけるドリフトの削減
この例では、3 次元姿勢グラフの最適化を使用して単眼カメラの推定軌跡 (位置と向き) におけるドリフトを減らす方法を説明します。ビジュアル オドメトリでは、カメラの現在のグローバルな姿勢 (現在のフレーム) を推定します。3 次元の点の三角形分割におけるマッチングが不適切であるか、誤差があることが原因で、ロボットの軌跡がグラウンド トゥルースからドリフトすることがよくあります。ループ閉じ込み検出と姿勢グラフの最適化により、このドリフトが減って誤差が補正されます。
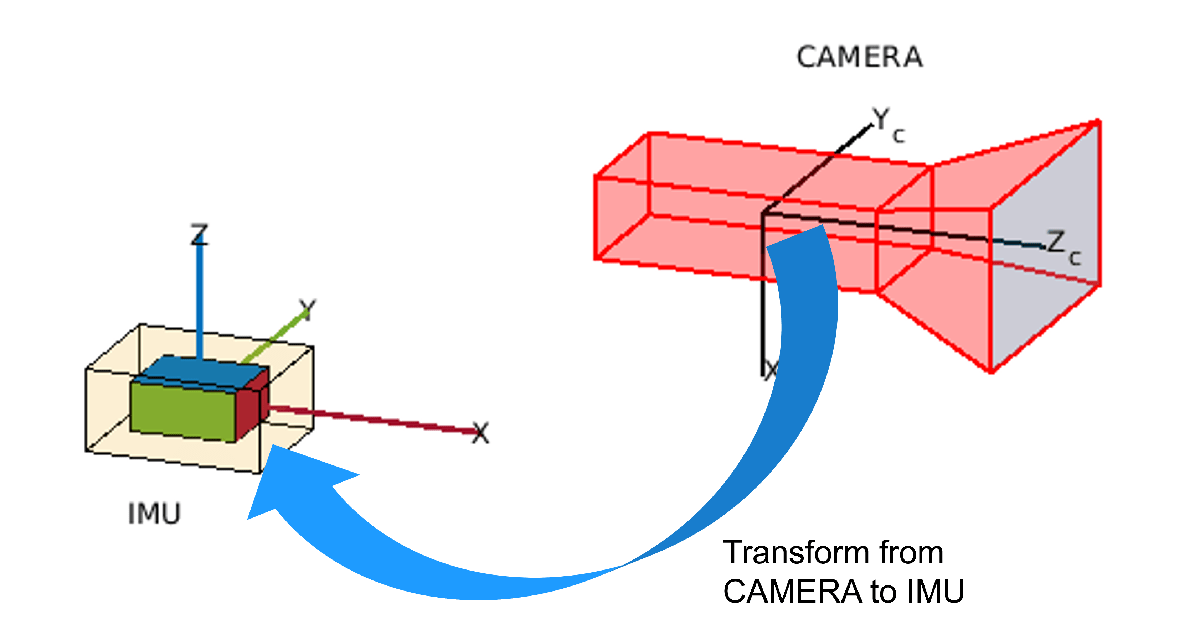
Estimate Camera-to-IMU Transformation Using Extrinsic Calibration
Use extrinsic calibration to estimate SE(3) transformation from camera to IMU for VINS workflows.