pcregisterfgr
構文
説明
[___] = pcregisterfgr(___,MaxIterations= は、前述した構文の引数の任意の組み合わせに加え、FGR アルゴリズムの最大反復回数を指定します。numIterations)
例
点群データをワークスペースに読み込みます。
ld = load("livingRoom.mat");
fixed = ld.livingRoomData{1};
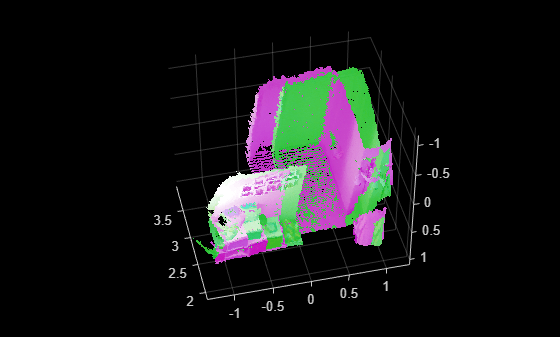
moving = ld.livingRoomData{2};レジストレーションの前に、点群データを可視化します。
figure pcshowpair(moving,fixed,VerticalAxis="Y",VerticalAxisDir="Down")
FGR レジストレーション アルゴリズムの精度と効率を向上させるために、点群をダウンサンプリングします。
fixedDownsampled = pcdownsample(fixed,gridNearest=0.05); movingDownsampled = pcdownsample(moving,gridNearest=0.05);
FGR アルゴリズムを使用して、点群のレジストレーションを行います。
gridSize = 0.1; tform = pcregisterfgr(movingDownsampled,fixedDownsampled,gridSize,MaxIterations=100);
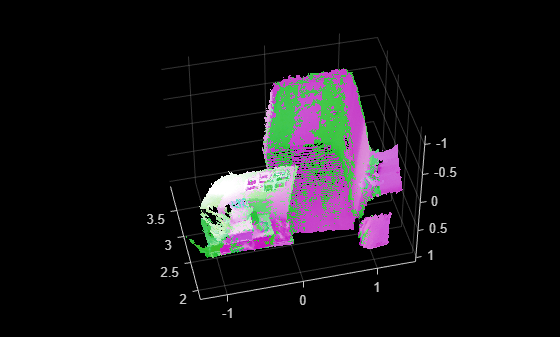
配置を可視化します。
movingRegistered = pctransform(moving,tform); pcshowpair(movingRegistered,fixed,VerticalAxis="Y",VerticalAxisDir="Down");
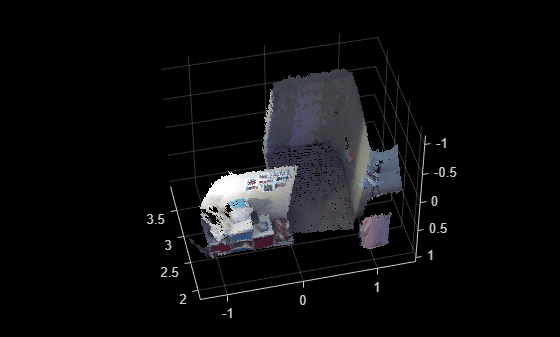
点群をマージし、マージ結果を可視化します。
mergeSize = 0.01; merged = pcmerge(movingRegistered,fixed,mergeSize); figure(Name = "merged point cloud after Fast Global registration"); pcshow(merged,VerticalAxis="Y",VerticalAxisDir ="Down");
入力引数
出力引数
ヒント
レジストレーションの精度と効率を向上させるには、
pcdownsample関数を使用して点群をダウンサンプリングしてから、pcregisterfgr関数を使用します。地上ビークルの点群の場合は、レジストレーションの前に
pcfitplaneまたはsegmentGroundFromLidarDataを使用して地面を削除することで、パフォーマンスと精度を向上できます。この方法の詳細については、LiDAR データからのマップの作成 (Automated Driving Toolbox)の例のhelperProcessPointCloud関数を参照してください。
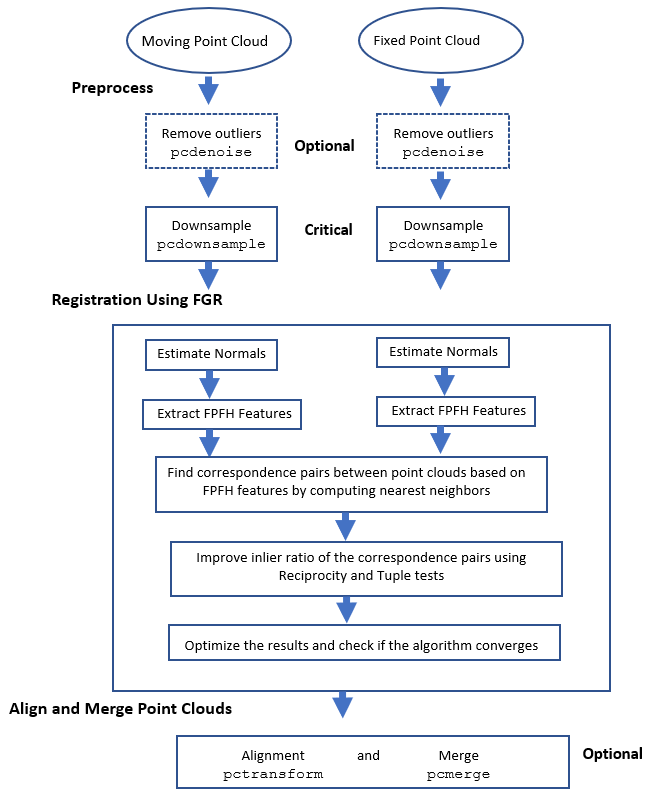
アルゴリズム
次の図は、FGR アルゴリズムを使用した点群のレジストレーションのワークフローを示しています。
参照
[1] Zhou, Qian-Yi, Jaesik Park, and Vladlen Koltun. “Fast Global Registration.” In Computer Vision – ECCV 2016, edited by Bastian Leibe, Jiri Matas, Nicu Sebe, and Max Welling. Lecture Notes in Computer Science vol. 9906:766–82. Cham: Springer International Publishing, 2016.
バージョン履歴
R2022b で導入
参考
関数
pcregistericp|pcregisterndt|pcregistercpd|pctransform|pcshow|pcdownsample|pcfitplane|pcdenoise|pcmerge