このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
LiDAR ビューアー
LiDAR データの可視化と解析
R2021b 以降
説明
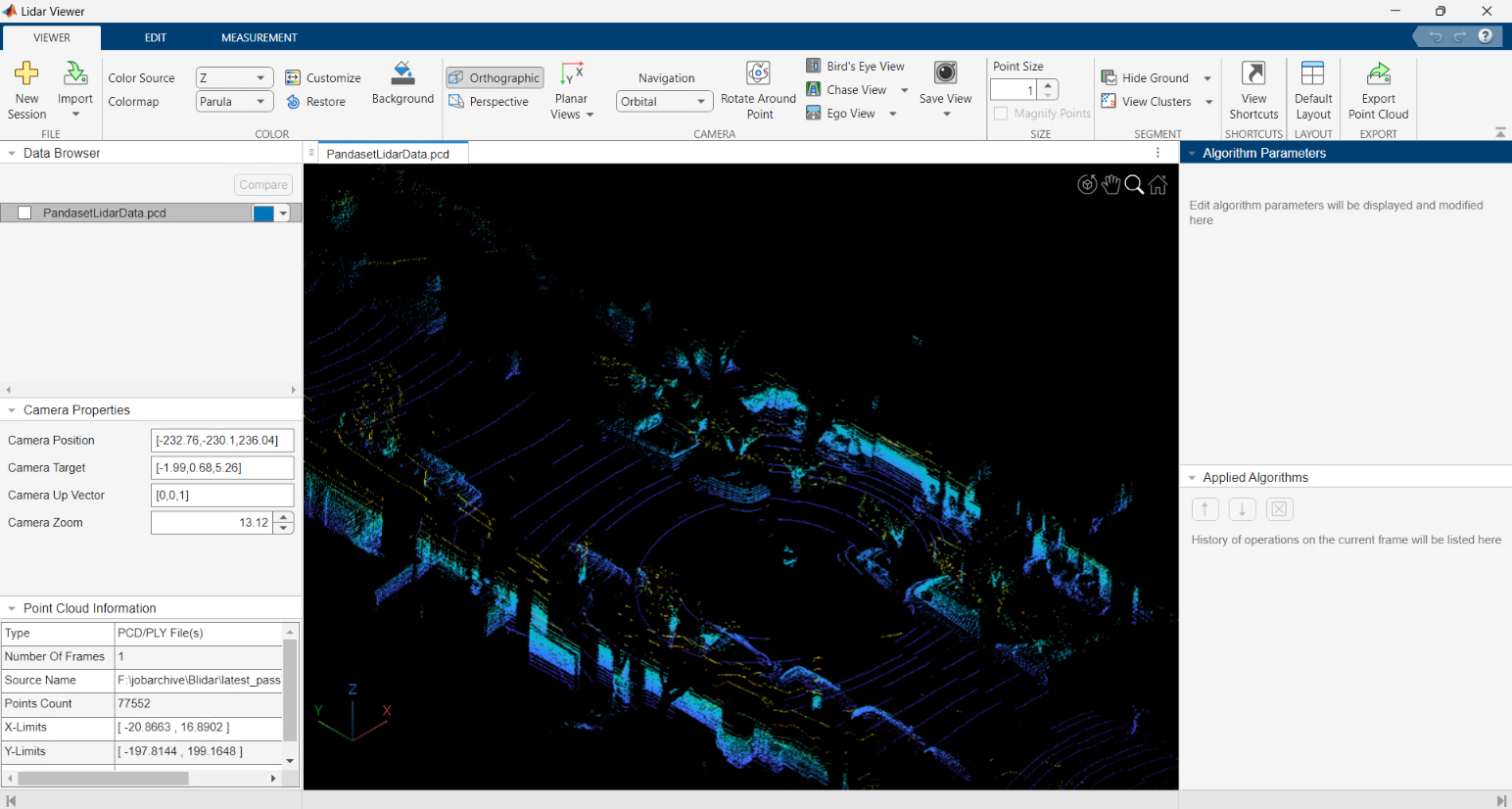
LiDAR ビューアー アプリを使用すると、点群データの可視化、解析、前処理を行うことができます。このアプリには次の機能があります。
点群データを読み込んで可視化する。このアプリでは、ワークスペースから
pointCloudオブジェクトをインポートし、PLY、PCAP、LAS、LAZ、PCD、E57、rosbag ファイル、または任意のカスタム ソースから点群データを読み取ることができます。処理した点群は PCD、PLY、LAS、または LAZ ファイルとしてエクスポートできます。距離、高さ、位置、ボリュームなどの点群の属性を測定する。
組み込みのカメラ ビュー、カラーマップ、クラスタリングのオプションを使用して点群データを表示および解析する。カスタムのカメラ ビューを作成して保存することもできます。
組み込みの前処理アルゴリズムを使用して、点群データのノイズ除去、ダウンサンプリング、フィルター処理、トリミング、および地面の除去を行う。
点群を編集するためのカスタムの前処理アルゴリズムを作成してインポートする。アルゴリズムのパラメーターを対話的に調整するためのユーザー インターフェイスを作成することもできます。
点群に対して実行される前処理操作を MATLAB® 関数としてエクスポートして再利用する。
オーバーレイを使用して 2 つ以上の点群を比較し、それらの間の点と点および点と面のメトリクスを計算する。
LiDAR ビューアー アプリを開く
MATLAB ツールストリップ: [アプリ] タブで、[イメージ処理とコンピューター ビジョン] セクションの下にあるアプリ アイコンをクリックします。
MATLAB コマンド ウィンドウ: 「
lidarViewer」と入力します。LiDAR ビューアー アプリの新しいセッションが開きます。
バージョン履歴
R2021b で導入
参考
アプリ
関数
pcshow|pointCloud|pcdownsample|pcmedian|pcdenoise|pcorganize|segmentGroundSMRF|pcfitplane|segmentGroundFromLidarData