pcorganize
説明
ptCloudOut = pcorganize(ptCloudIn,params)params を使用して、3 次元点群 ptCloudIn をオーガナイズド点群 ptCloutOut に変換します。
例
点群データをワークスペースに読み込みます。
fileName = fullfile(toolboxdir("lidar"),"lidardata","calibration","pointClouds","01.pcd"); ptCloudUnorg = pcread(fileName);
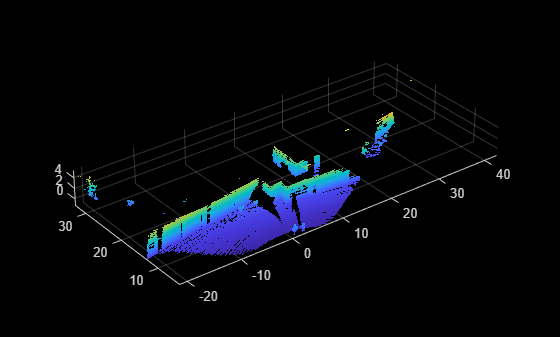
点群を可視化します。
figure pcshow(ptCloudUnorg)
LiDAR センサーの水平分解能を指定します。
horizontalResolution = 1024;
指定された horizontalResolution をもつ Ouster OS1 センサーを表す lidarParameters オブジェクトを作成します。
params = lidarParameters('OS1Gen1-128',horizontalResolution);アンオーガナイズド点群をオーガナイズド点群に変換します。
ptCloudOrg = pcorganize(ptCloudUnorg,params);
入力点群の次元を表示します。
size(ptCloudUnorg.Location)
ans = 1×2
122155 3
オーガナイズド点群の次元を表示します。pointCloud オブジェクトには、オーガナイズド点群は "M"×"N"×3 の配列として格納され、アンオーガナイズド点群は "M" 行 3 列の行列として格納されます。
size(ptCloudOrg.Location)
ans = 1×3
128 1024 3
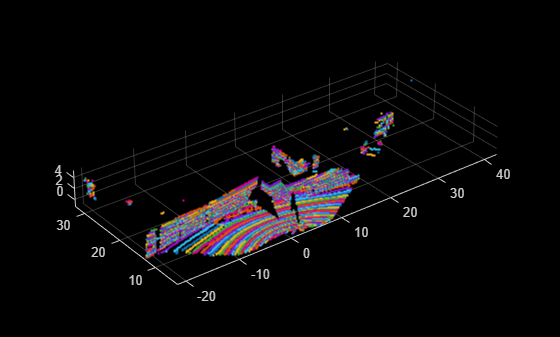
オーガナイズド点群を可視化します。各走査線を区別するために、異なる色を使用します。
figure pcshow(ptCloudOrg,ColorSource="Row",MarkerSize=20) colormap("lines")
入力引数
出力引数
拡張機能
バージョン履歴
R2021b で導入