lidarParameters
説明
lidarParameters オブジェクトは、LiDAR センサーのパラメーターを格納します。pcorganize 関数を使用してアンオーガナイズド点群からオーガナイズド点群に変換するには、これらのセンサー パラメーターを指定する必要があります。詳細については、LiDAR センサーのパラメーターを参照してください。
作成
構文
説明
params = lidarParameters(sensorName,horizontalResolution)sensorName のセンサー パラメーターを lidarParameters オブジェクトとして返します。horizontalResolution は HorizontalResolution プロパティを指定します。この構文を使用して、サポートされているセンサーのパラメーターを読み込みます。サポートされているセンサーを参照してください。
params = lidarParameters(verticalResolution,verticalFoV,horizontalResolution)verticalResolution、verticalFoV、および horizontalResolution 引数は、それぞれ VerticalResolution、VerticalFoV、および HorizontalResolution プロパティを設定します。
params = lidarParameters(verticalBeamAngles,horizontalResolution)verticalBeamAngles および horizontalResolution 引数は、それぞれ VerticalBeamAngles および HorizontalResolution プロパティを設定します。
params = lidarParameters(___,Name=Value)lidarParameters("HDL32E",horizontalResolution,SweepStartAngle=180) はセンサー スイープの開始角度を 180 度に指定します。
入力引数
プロパティ
例
点群データをワークスペースに読み込みます。
fileName = fullfile(toolboxdir("lidar"),"lidardata","calibration","pointClouds","01.pcd"); ptCloudUnorg = pcread(fileName);
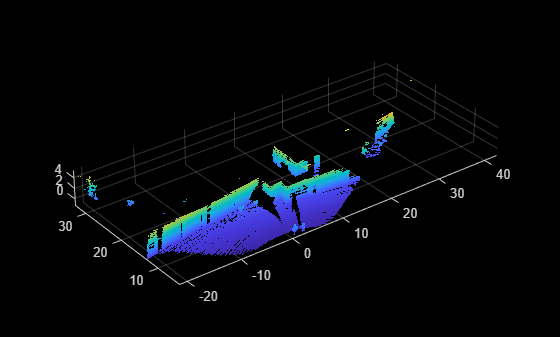
点群を可視化します。
figure pcshow(ptCloudUnorg)
LiDAR センサーの水平分解能を指定します。
horizontalResolution = 1024;
指定された horizontalResolution をもつ Ouster OS1 センサーを表す lidarParameters オブジェクトを作成します。
params = lidarParameters('OS1Gen1-128',horizontalResolution);アンオーガナイズド点群をオーガナイズド点群に変換します。
ptCloudOrg = pcorganize(ptCloudUnorg,params);
入力点群の次元を表示します。
size(ptCloudUnorg.Location)
ans = 1×2
122155 3
オーガナイズド点群の次元を表示します。pointCloud オブジェクトには、オーガナイズド点群は "M"×"N"×3 の配列として格納され、アンオーガナイズド点群は "M" 行 3 列の行列として格納されます。
size(ptCloudOrg.Location)
ans = 1×3
128 1024 3
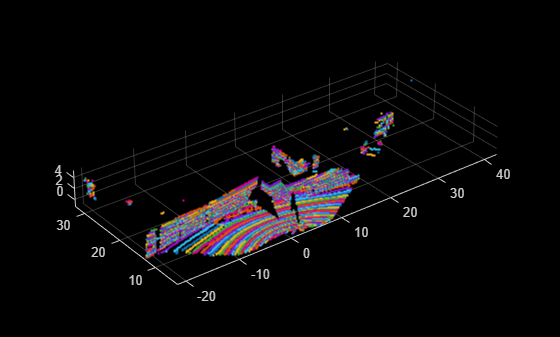
オーガナイズド点群を可視化します。各走査線を区別するために、異なる色を使用します。
figure pcshow(ptCloudOrg,ColorSource="Row",MarkerSize=20) colormap("lines")
LiDAR センサーのパラメーターを定義します。
verticalFoV = [2 -24.69]; verticalResolution = 32; horizontalResolution = 512;
lidarParmaters オブジェクトを定義します。
params = lidarParameters(verticalResolution,verticalFoV,...
horizontalResolution)params =
lidarParameters with properties:
HorizontalResolution: 512
VerticalResolution: 32
VerticalFoV: [2 -24.6900]
VerticalBeamAngles: [2 1.1390 0.2781 -0.5829 -1.4439 -2.3048 -3.1658 -4.0268 -4.8877 -5.7487 -6.6097 -7.4706 -8.3316 -9.1926 -10.0535 -10.9145 -11.7755 -12.6365 -13.4974 -14.3584 -15.2194 -16.0803 -16.9413 -17.8023 -18.6632 … ] (1×32 double)
HorizontalFoV: 360
HorizontalAngResolution: 0.7031
HorizontalBeamAngles: [0 0.7031 1.4062 2.1094 2.8125 3.5156 4.2188 4.9219 5.6250 6.3281 7.0312 7.7344 8.4375 9.1406 9.8438 10.5469 11.2500 11.9531 12.6562 13.3594 14.0625 14.7656 15.4688 16.1719 16.8750 17.5781 18.2812 18.9844 … ] (1×512 double)
SweepStartAngle: 0
RotateClockwise: 1
センサーの垂直ビームの角度を定義します。ビームの角度を確認するには、センサーのデータ ハンドブックを参照してください。ビーム構成の詳細については、LiDAR センサーのパラメーターを参照してください。
verticalBeamAngles = [15.0000 3.0000 1.5000 0.8333 0.1667 -0.5000 ... -1.1667 -1.8333 -2.5000 -3.1667 -3.8333 -4.5000 ... -5.1667 -5.8333 -9.0000 -13.0000];
センサーの水平分解能を定義します。
horizontalResolution = 512;
lidarParmaters オブジェクトを定義します。
params = lidarParameters(verticalBeamAngles,horizontalResolution)
params =
lidarParameters with properties:
HorizontalResolution: 512
VerticalResolution: 16
VerticalFoV: [15 -13]
VerticalBeamAngles: [15 3 1.5000 0.8333 0.1667 -0.5000 -1.1667 -1.8333 -2.5000 -3.1667 -3.8333 -4.5000 -5.1667 -5.8333 -9 -13]
HorizontalFoV: 360
HorizontalAngResolution: 0.7031
HorizontalBeamAngles: [0 0.7031 1.4062 2.1094 2.8125 3.5156 4.2188 4.9219 5.6250 6.3281 7.0312 7.7344 8.4375 9.1406 9.8438 10.5469 11.2500 11.9531 12.6562 13.3594 14.0625 14.7656 15.4688 16.1719 16.8750 17.5781 18.2812 18.9844 … ] (1×512 double)
SweepStartAngle: 0
RotateClockwise: 1