pcmedian
点群の座標に各軸に沿ってメディアン フィルターを適用
説明
ptCloudOut = pcmedian(ptCloudIn)pcmedian はエッジをゼロでパディングしません。代わりに、使用可能な近傍の値のみについて演算を行います。
入力点群がオーガナイズド点群の場合、関数 pcmedian は N 行 N 列の近傍法を使用します。点群がアンオーガナイズドの場合、関数は半径近傍法を使用します。
ptCloudOut = pcmedian(___,Name,Value)'FilterSize',3 は、オーガナイズド点群のメディアン フィルターのサイズを 3 に設定します。
例
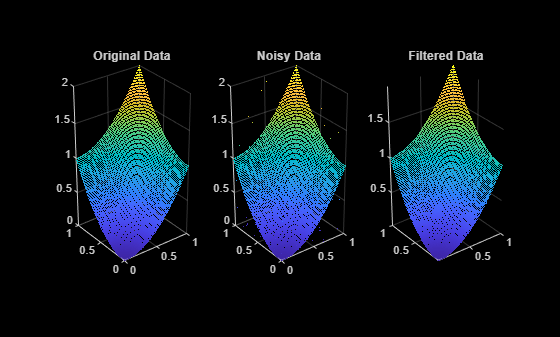
メディアン フィルターを使用して点群からノイズを除去します。最初に、点群にランダム ノイズを追加します。その後、関数 pcmedian を使用してノイズをフィルター処理します。
点群を作成します。
gv = 0:0.01:1; [X,Y] = meshgrid(gv,gv); Z = X.^2 + Y.^2; ptCloud = pointCloud(cat(3,X,Y,Z));
"z" 軸に沿ってランダム ノイズを追加します。
temp = ptCloud.Location; count = numel(temp(:,:,3)); temp((2*count) + randperm(count,100)) = rand(1,100); temp(count + randperm(count,100)) = rand(1,100); temp(randperm(count,100)) = rand(1,100); ptCloudA = pointCloud(temp);
メディアン フィルターを適用し、3 つの点群 (元の点群、ノイズを含む点群、フィルター処理後の点群) を表示します。
ptCloudB = pcmedian(ptCloudA); subplot(1,3,1) pcshow(ptCloud) title('Original Data') subplot(1,3,2) pcshow(ptCloudA) title('Noisy Data') subplot(1,3,3) pcshow(ptCloudB) title('Filtered Data')
点群データをワークスペースに読み込みます。
ptCloud = pcread('highwayScene.pcd'); roi = [0 20 0 20 -5 15]; indices = findPointsInROI(ptCloud,roi); ptCloud = select(ptCloud,indices); ptCloud = pcdownsample(ptCloud,'gridAverage',0.2);
点群データを表示します。各点はそれぞれの x 座標に基づいて色分けされます。
figure
pcshow(ptCloud.Location,ptCloud.Location(:,1))
view(-90,2)
title('Original Point Cloud')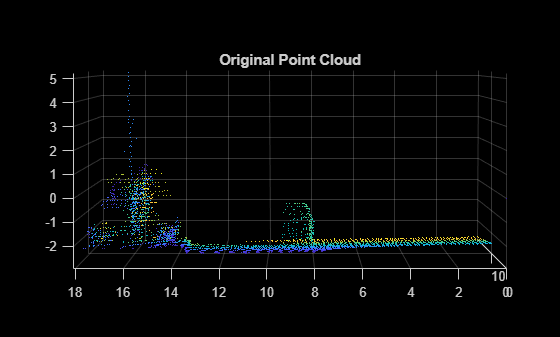
z チャネルに沿って区間 (a,b) にノイズを追加します。a と b の値については、ノイズが地面の近くに現れるような値を選択します。
temp = ptCloud.Location; count = numel(temp(:,3)); a = -2.5; b = -2; temp((2*count)+randperm(count,200)) = a+(b-a).*rand(1,200); ptCloudA = pointCloud(temp);
ノイズを含む点群を表示します。各点はそれぞれの x 座標に基づいて色分けされます。
figure
pcshow(ptCloudA.Location,ptCloudA.Location(:,1))
view(-90,2)
title('Noisy Point Cloud')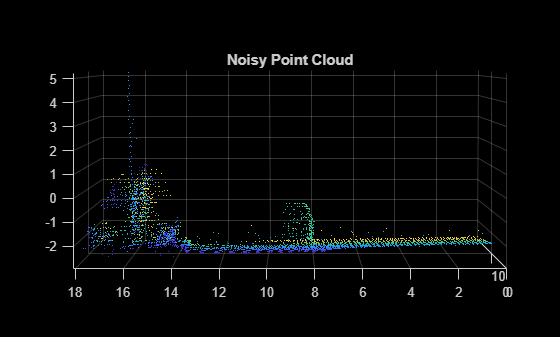
点群にメディアン フィルターを適用します。
ptCloudB = pcmedian(ptCloudA,'Dimensions',3,'Radius',1);
フィルター処理後の点群を表示します。各点はそれぞれの x 座標に基づいて色分けされます。
figure
pcshow(ptCloudB.Location, ptCloudB.Location(:,1))
view(-90,2)
title('Filtered Point Cloud')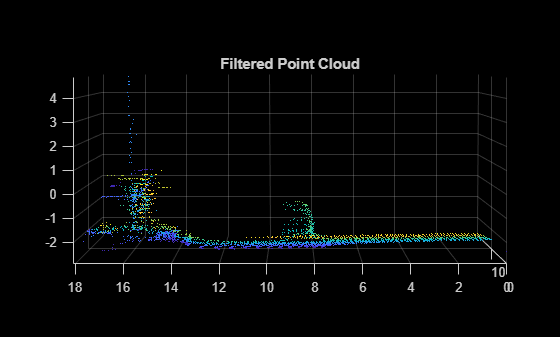
入力引数
名前と値の引数
出力引数
拡張機能
バージョン履歴
R2020b で導入