オブジェクトの検出と分類
Lidar Toolbox™ の関数により、深層学習ネットワークを使用して点群内のオブジェクトを検出し、事前定義済みのカテゴリに分類できます。オブジェクト検出には PointPillars ネットワークと Voxel R-CNN ネットワーク、オブジェクト分類には PointNet++ ネットワークを使用できます。それらのネットワークに学習させることも、用意されている事前学習済みのネットワークを用途に合わせて調整して使用することもできます。このツールボックスには、PointPillars および SqueezeSegV2 のネットワーク向けに CUDA® MEX コード生成のプロセスも含まれています。

関数
トピック
- Deep Learning with Point Clouds
Learn point cloud processing using deep learning.
- PointPillars 入門
PointPillars ネットワークの定義と同じものを使用してオブジェクト検出を実行する方法の説明。
- Get Started with Voxel R-CNN
Define voxel region-based convolutional neural network (Voxel R-CNN) and learn how to perform object detection using the same.
- 深層学習用のデータストア (Deep Learning Toolbox)
深層学習アプリケーションでデータストアを使用する方法を学びます。
- 深層学習層の一覧 (Deep Learning Toolbox)
MATLAB® のすべての深層学習層を確認できます。
注目の例

Detect Risk Trees Near Power Lines
Use point cloud data collected from aerial lidar scanning (ALS) to detect at-risk trees near power lines.

Determine Safe Landing Area for Aerial Vehicles
Demonstrates how to determine a safe landing area for aerial vehicles, such as helicopters and UAVs, by using aerial lidar data.

Complex-YOLO v4 ネットワークを使用した LiDAR オブジェクト検出
この例では、You Only Look Once version 4 (YOLO v4) 深層学習ネットワークを使用して、点群内のオブジェクトを検出する方法を説明します。この例では、次の作業を行います。

Code Generation for Lidar Object Detection Using SqueezeSegV2 Network
Generate CUDA® MEX code for a lidar object detection network. In the example, you first segment the point cloud with a pretrained network, then cluster the points and fit 3-D bounding boxes to each cluster. Finally, you generate MEX code for the network.

PointPillars 深層学習を使用した LiDAR の 3 次元オブジェクト検出
点群でのオブジェクト検出用に PointPillars ネットワークに学習させる。

PointPillars 深層学習を使用した LiDAR オブジェクト検出用のコード生成
この例では、PointPillars オブジェクト検出器用に CUDA® MEX を生成する方法を説明します。詳細については、Lidar Toolbox™ のPointPillars 深層学習を使用した LiDAR の 3 次元オブジェクト検出の例を参照してください。

Data Augmentations for Lidar Object Detection Using Deep Learning
Perform typical data augmentation techniques for 3-D object detection workflows with lidar data.

Lane Detection in 3-D Lidar Point Cloud
Detect lanes in lidar point clouds. You can use the intensity values returned from lidar point clouds to detect ego vehicle lanes. You can further improve the lane detection by using a curve-fitting algorithm and tracking the curve parameters. Lidar lane detection enables you to build complex workflows like lane keep assist, lane departure warning, and adaptive cruise control for autonomous driving. A test vehicle collects the lidar data using a lidar sensor mounted on its rooftop.

Curb Detection and Tracking in 3-D Lidar Point Cloud
Detect and track curbs in lidar point clouds. A curb is a line of stone or concrete, that connects the roadway to the sidewalk. Curbs act as delimiters for the drivable area of the road.

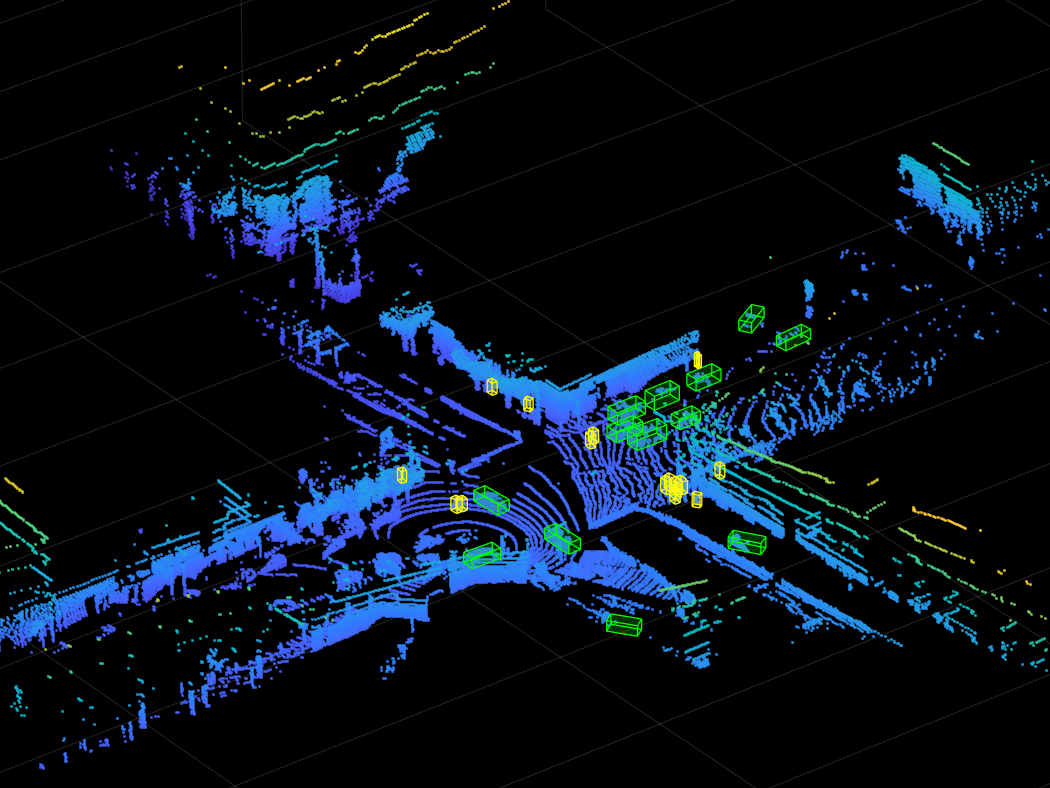
LiDAR を使用した車両の検出、分類、および追跡
エゴ ビークルに取り付けられている LiDAR センサーによって取得された LiDAR 点群データを使用して、車両を検出、分類、追跡する。

Track Vehicles Using Lidar: From Point Cloud to Track List
Track vehicles using measurements from a lidar sensor mounted on top of an ego vehicle. Lidar sensors report measurements as a point cloud. The example illustrates the workflow in MATLAB® for processing the point cloud and tracking the objects. For a Simulink® version of the example, refer to Track Vehicles Using Lidar Data in Simulink (Sensor Fusion and Tracking Toolbox).The lidar data used in this example is recorded from a highway driving scenario. In this example, you use the recorded data to track vehicles with a joint probabilistic data association (JPDA) tracker and an interacting multiple model (IMM) approach.

Track-Level Fusion of Radar and Lidar Data
Generate an object-level track list from measurements of a radar and a lidar sensor and further fuse them using a track-level fusion scheme. You process the radar measurements using an extended object tracker and the lidar measurements using a joint probabilistic data association (JPDA) tracker. You further fuse these tracks using a track-level fusion scheme. The schematic of the workflow is shown below.
Transfer Learning Using Voxel R-CNN for Lidar 3-D Object Detection
Detect 3-D objects in lidar data by using transfer learning with voxel region-based convolutional neural network (Voxel R-CNN).
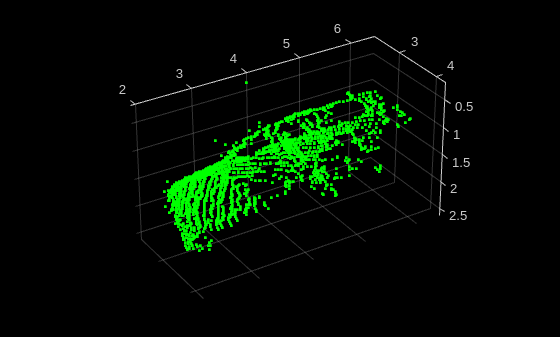
Point Cloud Classification Using PointNet++ Deep Learning
Classify 3-D objects in point cloud data by using a PointNet++ deep learning network.