PointPillars 入門
PointPillars は、2 次元畳み込み層を使用して 3 次元オブジェクト検出を行うための方法です。PointPillars ネットワークには、PointNet を使用して柱状 (垂直方向の柱) に整理された点群の表現を学習する学習可能な符号化器があります。ネットワークは、その後、2 次元畳み込みニューラル ネットワーク (CNN) を実行してネットワーク予測を生成し、その予測を復号化して、自動車、トラック、歩行者などのさまざまなオブジェクト クラスの 3 次元境界ボックスを生成します。
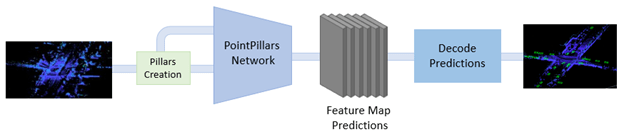
PointPillars ネットワークの主な段階は次のとおりです。
特徴符号化器を使用して点群をスパースな疑似イメージに変換する。
2 次元畳み込みバックボーンを使用して疑似イメージを高水準の表現に処理する。
検出ヘッドを使用して 3 次元境界ボックスを検出して回帰させる。
PointPillars ネットワーク
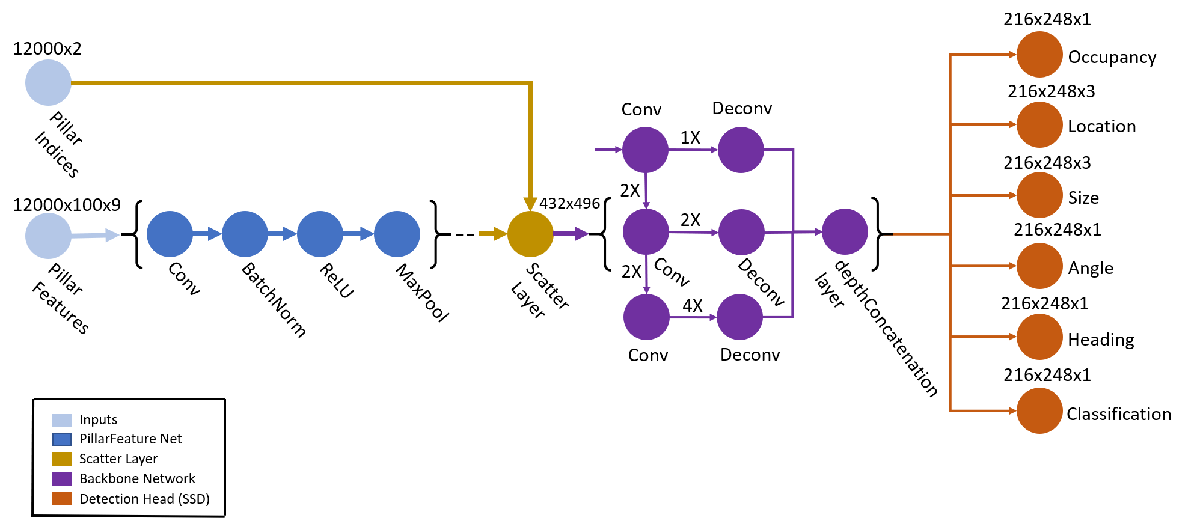
PointPillars ネットワークには、柱のインデックスと柱の特徴の 2 つの入力が必要です。インデックスは P 行 2 列、特徴は P×N×K の行列です。P はネットワークにおける柱の数、N は柱あたりの点の数、K は特徴次元です。
ネットワークは、簡略化された PointNet を使用して各柱内の点を処理する特徴符号化器から始まります。PointNet は、畳み込み、バッチ正規化、および正規化線形ユニット (ReLU) という一連の層を適用し、その後に最大プーリング層を適用して、柱ごとに 1 つの特徴ベクトルを抽出します。最後の散乱層は、柱のインデックスを使用して、抽出された特徴を 2 次元グリッドにマッピングします。このグリッドは疑似イメージを形成し、ネットワークの残りの部分がそれを使用します。
次に、ネットワークは 2 つのサブネットワークをもつ 2 次元 CNN バックボーンを使用します。最初のサブネットワークは、疑似イメージを複数の畳み込みブロックを通して処理し、空間解像度を段階的に低下させることで、ネットワークが高レベルの特徴を学習できるようにします。各ブロックは、畳み込み、バッチ正規化、および ReLU を適用します。2 番目のサブネットワークは、これらのブロックから出力を取得し、それらがすべて同じ空間サイズを共有するようにアップサンプリングします。これは、転置畳み込みを使用して各特徴マップをアップサンプリングし、その後にバッチ正規化と ReLU を適用します。ネットワークは、すべての特徴マップを同じ解像度にした後、それらを連結して統合された特徴マップを形成します。
最後に、ネットワークは統合された特徴マップを畳み込み層とシグモイド層をもつ 6 つの検出ヘッドを通して渡し、占有、位置、サイズ、角度、向き、およびクラスを推定します。
PointPillars ネットワークの作成
PointPillars 深層学習ネットワークは、ディープ ネットワーク デザイナー (Deep Learning Toolbox) アプリを使用して対話的に作成できます。PointPillars ネットワークをプログラムで作成するには、pointPillarsObjectDetector オブジェクトを使用します。
転移学習
"転移学習" とは、一般的な深層学習手法であり、新しいタスクのためにネットワークに学習させる開始点として事前学習済みのネットワークを使用します。
事前学習済みの pointPillarsObjectDetector ネットワークを使用して転移学習を実行するには、新しいオブジェクト クラスおよび対応するアンカー ボックスを指定します。次に、新しいデータ セットでネットワークに学習させます。
アンカー ボックスは、検出する特定のオブジェクト クラスのスケールと縦横比を取得します。アンカー ボックスは通常、学習データ セットのオブジェクト サイズに基づいて選択されます。アンカー ボックスの詳細については、アンカー ボックスによるオブジェクトの検出を参照してください。
PointPillars オブジェクト検出器の学習とオブジェクト検出の実行
PointPillars ネットワークに学習させるには、関数 trainPointPillarsObjectDetector を使用します。学習させた PointPillars ネットワークでオブジェクト検出を実行するには、関数 detect を使用します。PointPillars ネットワークに学習させる方法の詳細については、PointPillars 深層学習を使用した LiDAR の 3 次元オブジェクト検出を参照してください。
コード生成
PointPillars ネットワーク用の CUDA® コードを生成する方法については、PointPillars 深層学習を使用した LiDAR オブジェクト検出用のコード生成を参照してください。
参照
[1] Lang, Alex H., Sourabh Vora, Holger Caesar, Lubing Zhou, Jiong Yang, and Oscar Beijbom. “PointPillars: Fast Encoders for Object Detection From Point Cloud” In 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 12689–97. Long Beach, CA, USA: IEEE, 2019. https://doi.org/10.1109/CVPR.2019.01298.
[2] Hesai and Scale. PandaSet. Accessed September 18, 2025. https://pandaset.org/. The PandaSet data set is provided under the CC-BY-4.0 license.
[3] Xiao, Pengchuan, Zhenlei Shao, Steven Hao, et al. “PandaSet: Advanced Sensor Suite Dataset for Autonomous Driving.” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), IEEE, September 19, 2021, 3095–101. https://doi.org/10.1109/ITSC48978.2021.9565009.
参考
アプリ
- ディープ ネットワーク デザイナー (Deep Learning Toolbox) | 点群アナライザー | LiDAR ラベラー