pcfitcuboid
3 次元点群に直方体を当てはめ
構文
説明
model = pcfitcuboid(___,Name,Value)'AzimuthRange',[25 75] は、関数の方位角の角度範囲を設定します。
例
点群のクラスターの周囲に直方体の境界ボックスを当てはめます。
点群データをワークスペースに読み込みます。
data = load('drivingLidarPoints.mat');関心領域 (ROI) を定義して点群からトリミングします。点群の選択した ROI を可視化します。
roi = [-40 40 -6 9 -2 1]; in = findPointsInROI(data.ptCloud,roi); ptCloudIn = select(data.ptCloud,in); hcluster = figure; panel = uipanel('Parent',hcluster,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn,'MarkerSize',30,'Parent',ax) title('Input Point Cloud')
地面をセグメント化します。セグメント化された地面を可視化します。
maxDistance = 0.3; referenceVector = [0 0 1]; [~,inliers,outliers] = pcfitplane(ptCloudIn,maxDistance,referenceVector); ptCloudWithoutGround = select(ptCloudIn,outliers,'OutputSize','full'); hSegment = figure; panel = uipanel('Parent',hSegment,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshowpair(ptCloudIn,ptCloudWithoutGround,'Parent',ax) legend('Ground Region','Non-Ground Region','TextColor', [1 1 1]) title('Segmented Ground Plane')

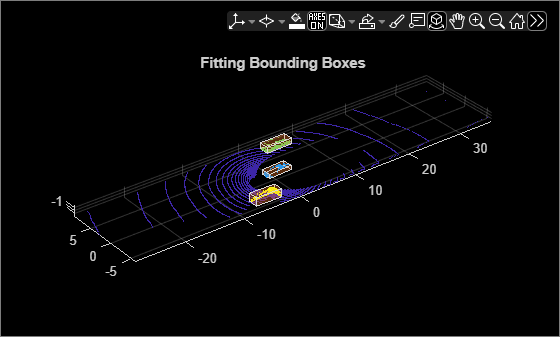
点群の地面以外の領域をクラスターにセグメント化します。セグメント化された点群を可視化します。
distThreshold = 1; [labels,numClusters] = pcsegdist(ptCloudWithoutGround,distThreshold); labelColorIndex = labels; hCuboid = figure; panel = uipanel('Parent',hCuboid,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn.Location,labelColorIndex,'Parent',ax) title('Fitting Bounding Boxes') hold on
各クラスターに境界ボックスを当てはめます。オレンジのハイライトで可視化されます。
for i = 1:numClusters idx = find(labels == i); model = pcfitcuboid(ptCloudWithoutGround,idx); plot(model) end
入力引数
名前と値の引数
出力引数
アルゴリズム
この関数は L 字型ベースの検出アルゴリズムを使用して点群データに直方体を当てはめます。点群にあるすべての点について、この関数は四角形のとりうるすべての方向を反復し、対応する平方誤差を求めます。四角形のとりうる方向は、四角形の 2 辺が直交しているため、[0, 90] 度の範囲内にあります。AzimuthRange 引数を使用して、四角形のとりうる方向を指定できます。次に、この関数は、誤差が最小となる方向を選択し、その方向に沿って四角形を当てはめます。
参照
[1] Xiao Zhang, Wenda Xu, Chiyu Dong and John M. Dolan, "Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners", IEEE Intelligent Vehicles Symposium, June 2018
拡張機能
バージョン履歴
R2020b で導入