watershed
Watershed 変換
説明
watershed 変換は、明るいピクセルが高い高度、暗いピクセルが低い高度を表す表面として扱うことにより、イメージ内の "集水域 (catchment basins)" または "流域の稜線 (watershed ridge lines)" を検出します。watershed 変換を使用して、連続する関心領域を個別のオブジェクトにセグメント化できます。
例
オーバーラップした 2 つの円形オブジェクトが含まれるバイナリ イメージを作成します。イメージを表示します。
center1 = -40;
center2 = -center1;
dist = sqrt(2*(2*center1)^2);
radius = dist/2 * 1.4;
lims = [floor(center1-1.2*radius) ceil(center2+1.2*radius)];
[x,y] = meshgrid(lims(1):lims(2));
bw1 = sqrt((x-center1).^2 + (y-center1).^2) <= radius;
bw2 = sqrt((x-center2).^2 + (y-center2).^2) <= radius;
bw = bw1 | bw2;
imshow(bw)
title('Binary Image with Overlapping Objects')
バイナリ イメージの補数の距離変換を計算します。出力イメージの各ピクセルの値は、そのピクセルから bw 内の最も近い非ゼロ ピクセルまでの距離です。
D = bwdist(~bw);
imshow(D,[])
title('Distance Transform of Binary Image')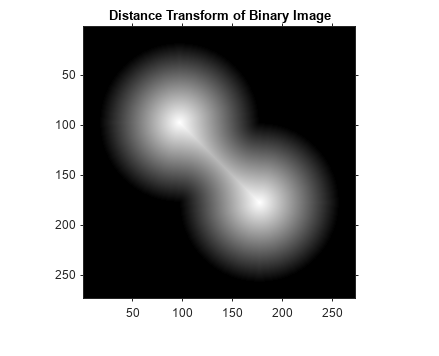
Watershed 変換の場合に明るいピクセルが高い高度、暗いピクセルが低い高度を表すように、距離変換されたイメージの補数を取ります。
D = -D;
imshow(D,[])
title('Complement of Distance Transform')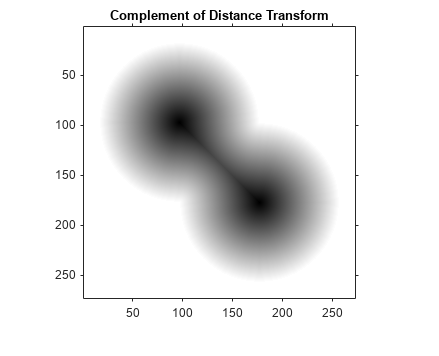
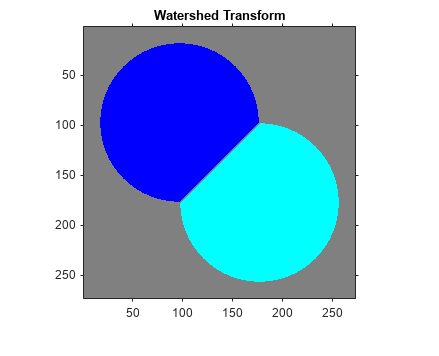
Watershed 変換を計算します。ROI の外側にあるピクセルを 0 に設定します。
L = watershed(D); L(~bw) = 0;
結果として得られるラベル行列を RGB イメージとして表示します。
rgb = label2rgb(L,'jet',[.5 .5 .5]); imshow(rgb) title('Watershed Transform')
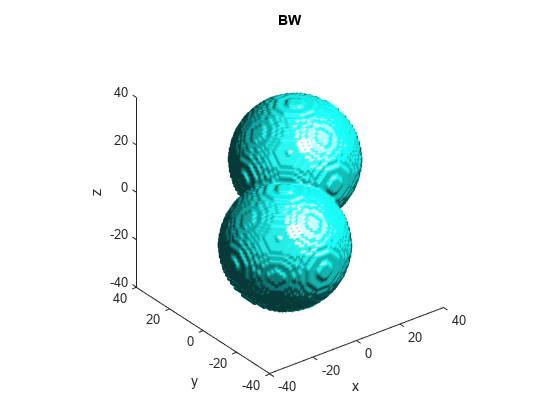
オーバーラップする 2 つ球が含まれる 3 次元バイナリ イメージを作成します。
center1 = -10; center2 = -center1; dist = sqrt(3*(2*center1)^2); radius = dist/2 * 1.4; lims = [floor(center1-1.2*radius) ceil(center2+1.2*radius)]; [x,y,z] = meshgrid(lims(1):lims(2)); bw1 = sqrt((x-center1).^2 + (y-center1).^2 + ... (z-center1).^2) <= radius; bw2 = sqrt((x-center2).^2 + (y-center2).^2 + ... (z-center2).^2) <= radius; bw = bw1 | bw2; figure, isosurface(x,y,z,bw,0.5), axis equal, title('BW') xlabel x, ylabel y, zlabel z xlim(lims), ylim(lims), zlim(lims) view(3), camlight, lighting gouraud
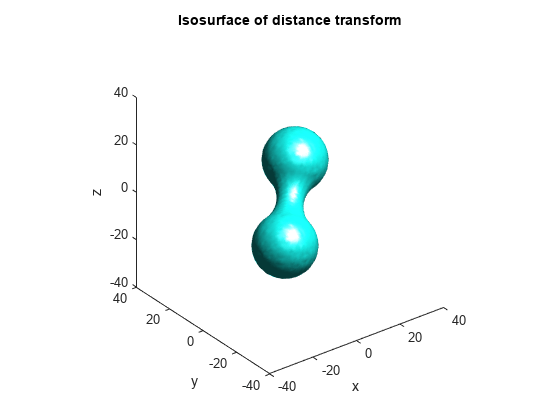
距離変換を計算します。
D = bwdist(~bw); figure, isosurface(x,y,z,D,radius/2), axis equal title('Isosurface of distance transform') xlabel x, ylabel y, zlabel z xlim(lims), ylim(lims), zlim(lims) view(3), camlight, lighting gouraud
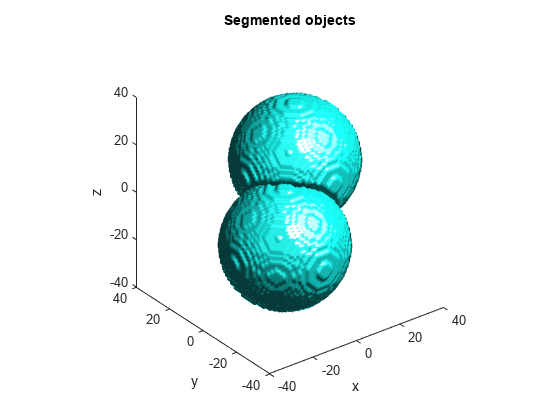
距離変換の補数を計算し、オブジェクトでないピクセルを Inf に強制し、watershed 変換を計算します。
D = -D; D(~bw) = Inf; L = watershed(D); L(~bw) = 0; figure isosurface(x,y,z,L==1,0.5) isosurface(x,y,z,L==2,0.5) axis equal title('Segmented objects') xlabel x, ylabel y, zlabel z xlim(lims), ylim(lims), zlim(lims) view(3), camlight, lighting gouraud
watershed セグメント化の際に、浅い局所的な最小値を抑制することでオーバーセグメンテーションを防ぐことができます。
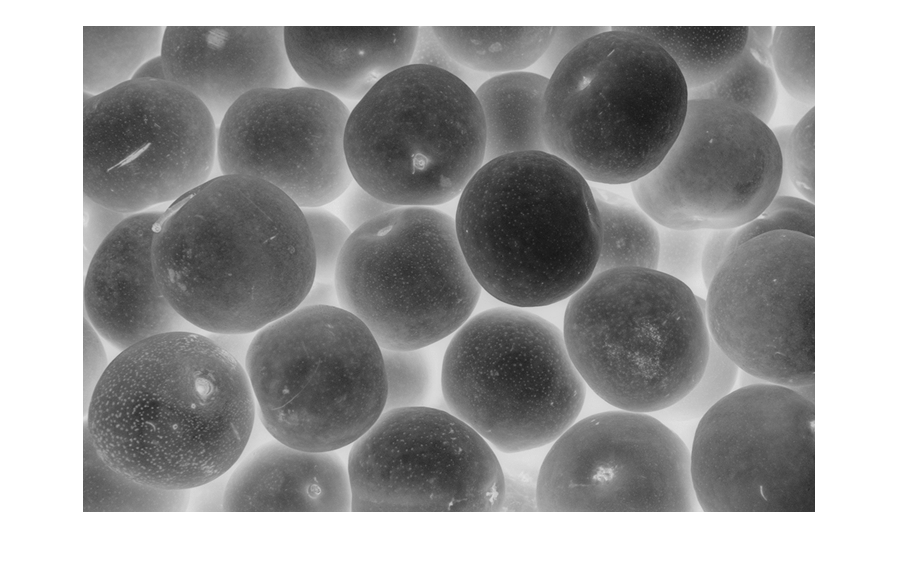
セグメント化する梨の RGB イメージを読み込んで表示します。イメージをグレースケールに変換して表示します。各梨の中心部にある明るい部分は、局所的な最大値に対応しています。
RGB = imread("pears.png");
I = im2gray(RGB);
imshow(I)
watershed セグメント化では、このイメージは流域の稜線と集水域から成る地表面に似ています。地表面に水が流れ込むと、その水は集水域に蓄えられます。グレースケール イメージでは、局所的な最小値が集水域に相当します。梨をセグメント化するには、梨の中心部が局所的な最小値となるように、イメージを反転させます。
Icomp = imcomplement(I); imshow(Icomp)
反転したイメージを 3 次元表面として表示します。このとき、各ピクセルの 3 番目の次元が強度値となります。各梨の深い領域の底はスパイク状になっています。これは、水が蓄えられる集水域のように、数多くの浅い局所的な最小値を表しています。
surf(Icomp,EdgeColor="none")
colormap(gray)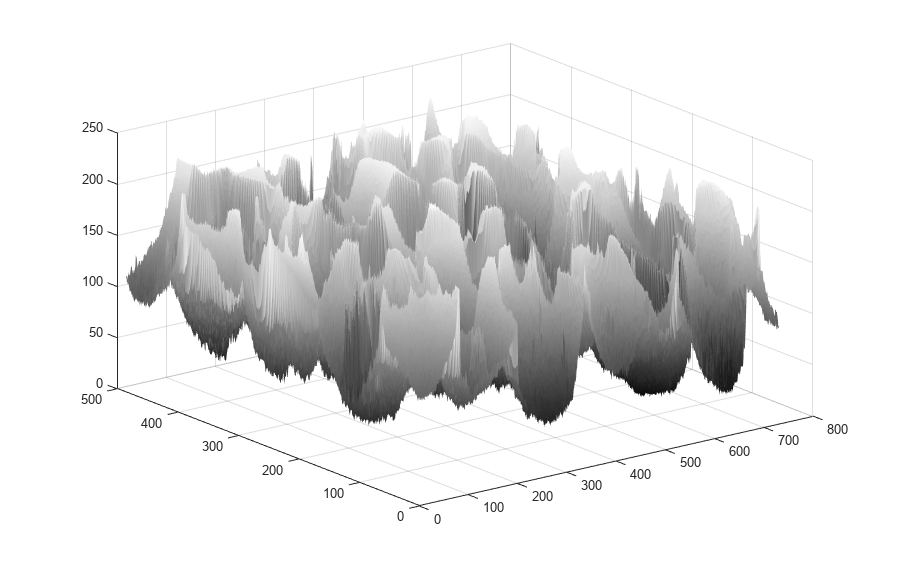
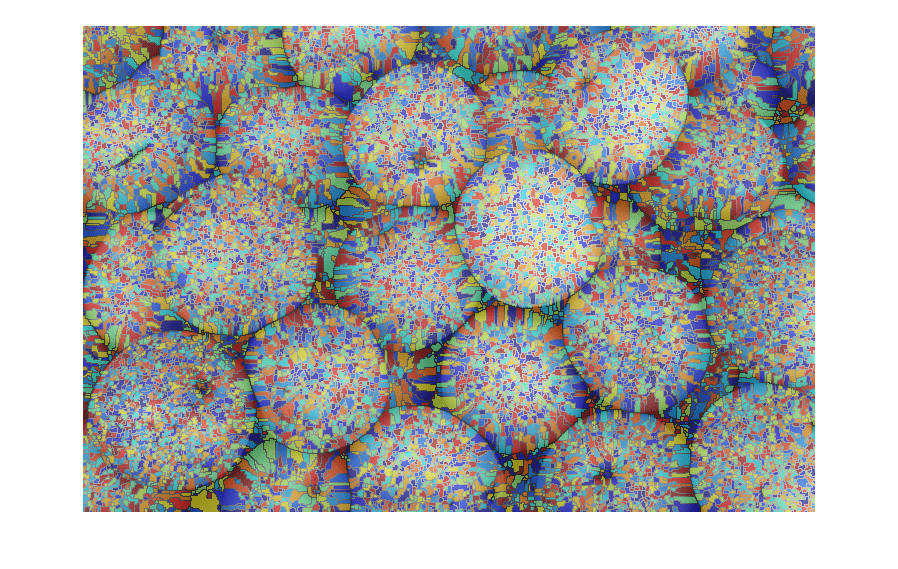
フィルター処理されていないイメージをセグメント化し、その結果をラベルとして元のイメージに重ね合わせて表示します。このイメージは細かくセグメント化されすぎています。これは、各梨に 1 つのマスクが割り当てられているのではなく、数多くの小さなマスクが存在することを意味しています。
L = watershed(Icomp); overlay = labeloverlay(I,L); imshow(overlay)
H-minima 変換を適用し、浅い最小値を抑制します。h の値は試行錯誤で決定されています。この値を変更し、h の値がセグメント化の結果に与える影響を確認してください。
h =  30;
Ifilt = imhmin(Icomp,h);
30;
Ifilt = imhmin(Icomp,h);フィルター処理されたイメージを 3 次元表面として表示します。
surf(Ifilt,EdgeColor="none")
colormap(gray)
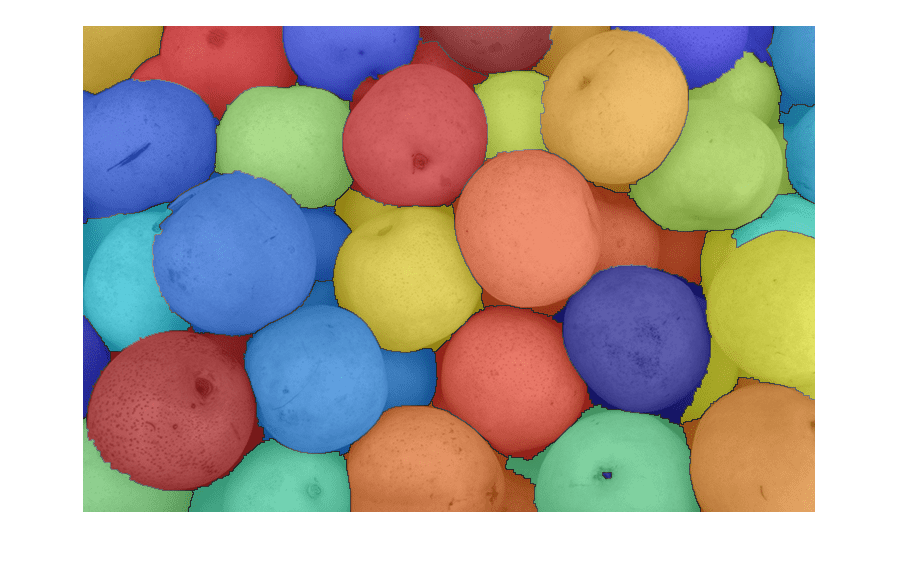
フィルター処理されたイメージをセグメント化し、その結果を表示します。このイメージでは、前景にある各梨に概ね 1 つのマスクが割り当てられています。
Lfilt = watershed(Ifilt); overlayfilt = labeloverlay(I,Lfilt); imshow(overlayfilt)
入力引数
入力イメージ。任意の次元の数値配列または logical 配列として指定します。
データ型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
ピクセルの連結性。次の表のいずれかの値を指定します。既定の連結性は 2 次元イメージでは 8、3 次元イメージでは 26 です。
値 | 意味 | |
|---|---|---|
2 次元連結性 | ||
| ピクセルのエッジの部分が接触している場合、ピクセルは連結されます。ピクセルの近傍は水平方向または垂直方向に隣接するピクセルです。 |
現在のピクセルを灰色で示します。 |
| ピクセルのエッジまたはコーナーが接触している場合、ピクセルは連結されます。ピクセルの近傍は水平方向、垂直方向または対角方向に隣接するピクセルです。 |
現在のピクセルを灰色で示します。 |
3 次元連結性 | ||
| 面が接触している場合、ピクセルは連結されます。ピクセルの近傍は次のように隣接するピクセルです。
|
現在のピクセルを灰色で示します。 |
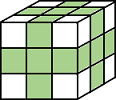
| 面またはエッジが接触している場合、ピクセルは連結されます。ピクセルの近傍は次のように隣接するピクセルです。
|
現在のピクセルは立方体の中心です。 |
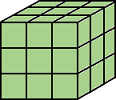
| 面、エッジまたはコーナーが接触している場合、ピクセルは連結されます。ピクセルの近傍は次のように隣接するピクセルです。
|
現在のピクセルは立方体の中心です。 |


高次元の場合、watershed は既定値 conndef(ndims(A),"maximal")
メモ
既定以外の連結性を指定した場合、イメージのエッジ上のピクセルは境界上のピクセルであると見なされません。たとえば、conn = [0 0 0; 1 1 1; 0 0 0] の場合、最初と最後の行の上の要素は、連結性の定義に従って、イメージの外側の領域と接続していないため境界のピクセルとは見なされません。
データ型: double | logical
出力引数
ヒント
オーバーセグメンテーションを防ぐには、関数
watershedを使用する前に関数imhminを使用して、浅い位置にある最小値をイメージから削除します。
アルゴリズム
watershed は Fernand Meyer アルゴリズムを使用します [1]。
参照
[1] Meyer, Fernand, "Topographic distance and watershed lines,” Signal Processing , Vol. 38, July 1994, pp. 113-125.