Unreal Engine シミュレーション用のセンサーの選択
Automated Driving Toolbox™ では、バーチャル環境から高忠実度のセンサー データを取得できます。この環境は、Epic Games® の Unreal Engine® を使用してレンダリングされます。
3D 可視化環境でモデルをシミュレーションするには、Simulink® 3D Animation™ が必要です。
次の表は、この環境でシミュレートできるセンサー ブロックをまとめています。
| センサー ブロック | 説明 | 可視化 | 例 |
|---|---|---|---|
| Video Viewer ブロックまたは To Video Display ブロックを使用して、カメラ イメージを表示します。サンプルの可視化:
| Design Lane Marker Detector Using Unreal Engine Simulation Environment | |
Video Viewer ブロックまたは To Video Display ブロックを使用して、深度マップを表示します。サンプルの可視化:
| Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation | ||
Video Viewer ブロックまたは To Video Display ブロックを使用して、セマンティック セグメンテーション マップを表示します。サンプルの可視化:
| Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation | ||
| Video Viewer ブロックまたは To Video Display ブロックを使用して、カメラ イメージを表示します。サンプルの可視化:
| Simulate Simple Driving Scenario and Sensor in Unreal Engine Environment | |
| MATLAB Function ブロック内の
| Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment | |
鳥瞰図スコープを使用して、LiDAR のカバレッジ領域と検出を表示します。サンプルの可視化:
| Visualize Sensor Data from Unreal Engine Simulation Environment | ||
| 鳥瞰図スコープを使用して、レーダーのカバレッジ領域と検出を表示します。サンプルの可視化:
| Unreal Engine 環境でのビジョン センサーとレーダー センサーのシミュレーション Visualize Sensor Data from Unreal Engine Simulation Environment | |
| Simulation 3D Vision Detection Generator |
| 鳥瞰図スコープを使用して、ビジョンのカバレッジ領域と検出を表示します。サンプルの可視化:
| |
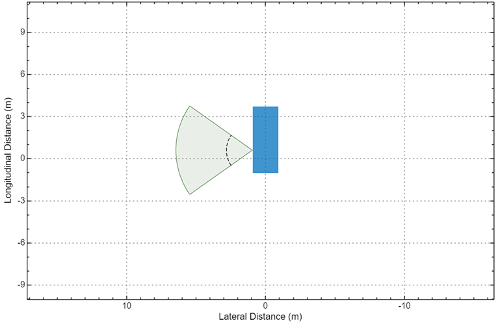
| Simulation 3D Ultrasonic Sensor |
| 鳥瞰図スコープを使用して、超音波領域のカバレッジ領域と検出を表示します。サンプルの可視化: |








参考
ブロック
- Simulation 3D Scene Configuration | Simulation 3D Vehicle with Ground Following | Simulation 3D Probabilistic Radar Configuration