step
動的システムのステップ応答
構文
説明
step は td 時間単位の後、U から U + dU までの入力値のステップ変化に対するステップ応答を計算します。

ここで
t0 はシミュレーション開始時間です。
td はステップ遅延です。
U はベースライン入力値 (バイアス) です。
dU はステップ振幅です。
既定では、関数は t0 = 0、U = 0、dU = 1、および td = 0 でステップを適用します。ただし、RespConfig を使用してこれらの値を構成できます。また、初期状態 x(t0) を指定することもできます。初期状態を指定しない場合、step では、初期状態としてシステムが入力レベル U で停止しているものと想定されます。
[ は、ステップ振幅や入力オフセットなど、ステップ応答を計算するための追加オプションを指定します。y,tOut] = step(___,config)RespConfig を使用して config を作成します。
step(___) は、前述のすべての入力引数の組み合わせについて、sys のステップ応答を既定のプロット オプションでプロットします。プロットをさらにカスタマイズするには、stepplot を使用します。
複数の動的システムの応答を同じプロット上にプロットするには、
sysをモデルのコンマ区切りリストとして指定します。たとえば、step(sys1,sys2,sys3)は 3 つのモデルの応答を同じプロット上にプロットします。プロット内の各システムの色、ライン スタイル、およびマーカーを指定するには、システムごとに
LineSpec値を指定します。たとえば、step(sys1,LineSpec1,sys2,LineSpec2)は 2 つのモデルをプロットし、それらのプロット スタイルを指定します。LineSpec値の指定の詳細については、stepplotを参照してください。
例
以下の伝達関数で表される連続時間システムのステップ応答をプロットします。
この例では、伝達関数を表す tf モデルを作成します。零点-極-ゲイン (zpk) モデルや状態空間 (ss) モデルなど、他の動的システム タイプのステップ応答を同様にプロットできます。
sys = tf(4,[1 2 10]);
ステップ応答をプロットします。
step(sys)
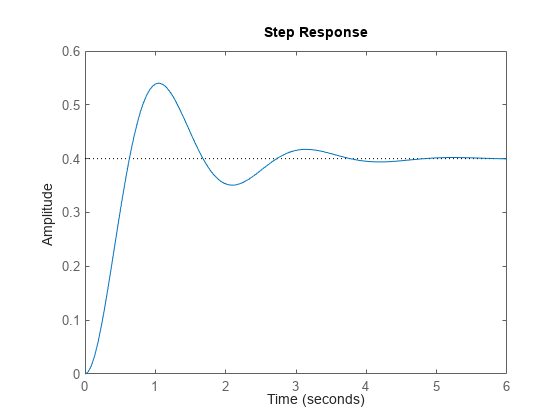
step プロットには、定常状態の応答を示す水平の点線が自動的に含まれます。MATLAB® Figure ウィンドウで、プロットを右クリックして、ピーク応答や整定時間など他のステップ応答の特性を表示できます。これらの特性の詳細については、stepinfoを参照してください。
離散時間システムのステップ応答をプロットします。システムは 0.2 秒のサンプル時間をもち、次の状態空間行列で表されます。
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;状態空間モデルを作成し、そのステップ応答をプロットします。
sys = ss(A,B,C,D,0.2); step(sys)
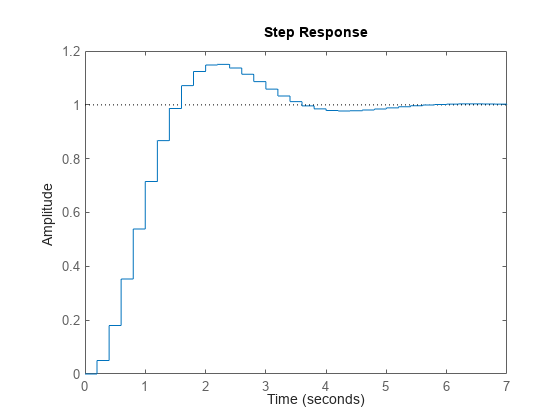
ステップ応答にはモデルの離散化が反映され、0.2 秒おきに計算される応答が表示されます。
次の伝達関数のステップ応答を調べます。
sys = zpk(-1,[-0.2+3j,-0.2-3j],1) * tf([1 1],[1 0.05])
sys =
(s+1)^2
----------------------------
(s+0.05) (s^2 + 0.4s + 9.04)
Continuous-time zero/pole/gain model.
Model Properties
step(sys)
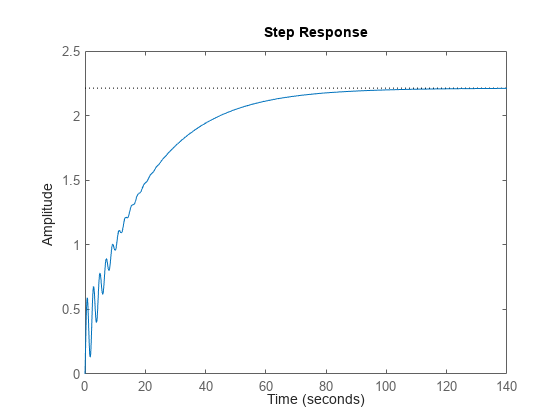
既定では、step は応答が向かっている定常状態を示す終了時間を選択します。このシステムには高速過渡状態がありますが、この時間スケールでは不明瞭です。過渡応答を詳しく調べるには、ステップ プロットを t = 15 秒に制限します。
step(sys,15)
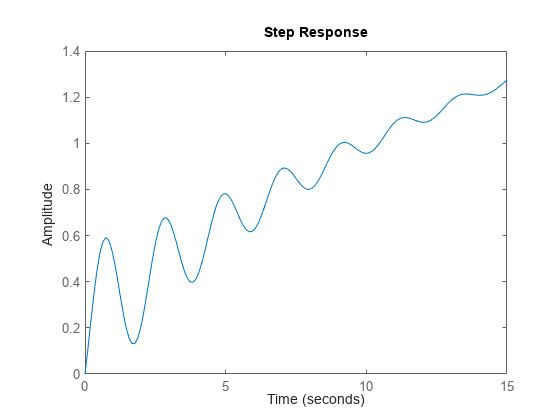
あるいは、ステップ応答を調べる正確な時間を、一定間隔で区切って指定することができます。たとえば、過渡状態の終わりからシステムが定常状態に到達するまでの応答を調べます。
t = 20:0.2:120; step(sys,t)
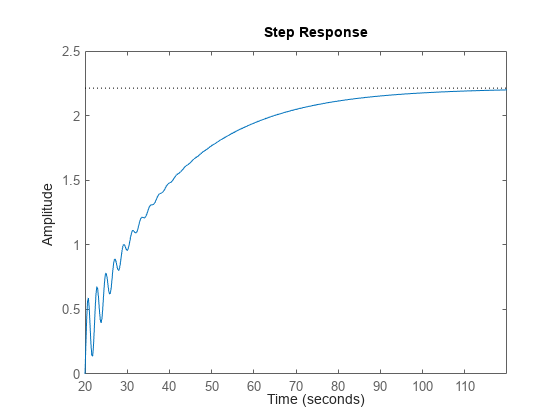
このプロットは t = 20 で開始しますが、step は常に t = 0 でステップ入力を適用します。
以下の 2 次状態空間モデルについて考えます。
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
このモデルには 2 つの入力と 1 つの出力があるため、最初の入力から出力へと、2 番目の入力から出力への 2 つのチャネルがあります。各チャネルには独自のステップ応答があります。
step を使用すると、すべてのチャネル応答が計算されます。
step(sys)
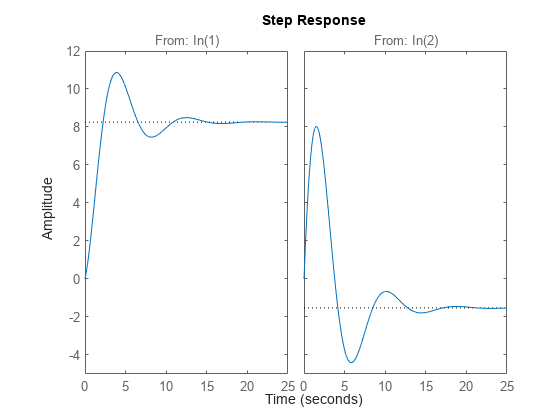
左のプロットには最初の入力チャネルのステップ応答が表示され、右のプロットには 2 番目の入力チャネルのステップ応答が表示されます。step を使用して MIMO モデルの応答をプロットするたびに、モデルのすべての I/O チャネルを表すプロットの配列が生成されます。たとえば、5 つの状態、3 つの入力、および 2 つの出力をもつランダム状態空間モデルを作成し、そのステップ応答をプロットするとします。
sys = rss(5,2,3); step(sys)
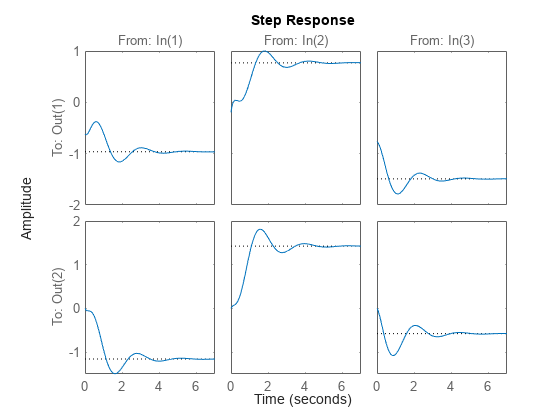
MATLAB Figure ウィンドウで、プロットを右クリックし、[I/O セレクター] を選択して、プロットをチャネルのサブセットに制限できます。
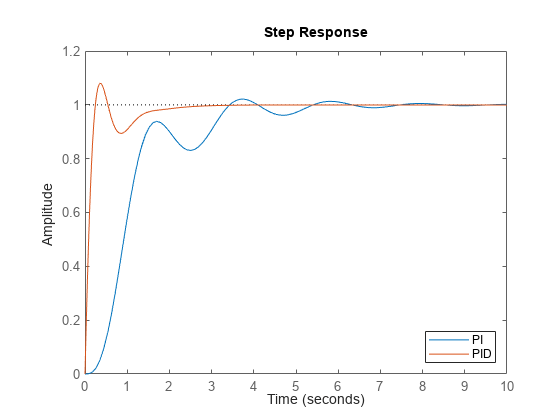
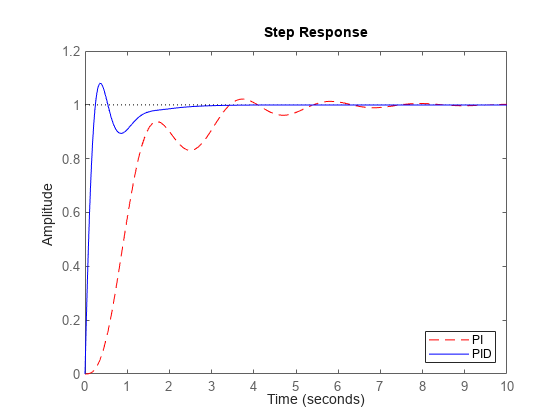
step を使用して、複数の動的システムの応答を同じ軸上にプロットできます。たとえば、PI コントローラーと PID コントローラーでシステムの閉ループ応答を比較します。システムの伝達関数を作成し、コントローラーを調整します。
H = tf(4,[1 2 10]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
閉ループ システムを作成し、そのステップ応答をプロットします。
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1); step(sys1,sys2) legend('PI','PID','Location','SouthEast')
既定では、step は、プロットするシステムごとに異なる色を選択します。入力引数 LineSpec を使用して色とライン スタイルを指定できます。
step(sys1,'r--',sys2,'b') legend('PI','PID','Location','SouthEast')
最初の LineSpec "'r--' は、PI コントローラーでの応答を表す赤い破線を指定します。2 番目の LineSpec "'b' は、PID コントローラーでの応答を表す青い実線を指定します。凡例に、指定された色とライン スタイルが反映されます。プロットをさらにカスタマイズするには、stepplot を使用します。
「複数システムの応答の比較」の例では、1 つの軸に複数の個々のシステムの応答をプロットする方法を示します。モデル配列に複数の動的システムが配置されている場合、step はそのすべての応答を一度にプロットします。
モデル配列を作成します。この例では、固有振動数が異なる 2 次伝達関数の 1 次元配列を使用します。最初に、モデル配列のメモリを事前に割り当てます。次のコマンドで、零点とゲインの SISO 伝達関数からなる 1 行 5 列の行を作成します。最初の 2 つの次元は、モデルの出力と入力を表します。残りの次元は配列の次元です
sys = tf(zeros(1,1,1,5));
配列を設定します。
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
(モデル配列とそれらの作成方法の詳細については、モデル配列を参照してください)。配列内のすべてのモデルのステップ応答をプロットします。
step(sys)
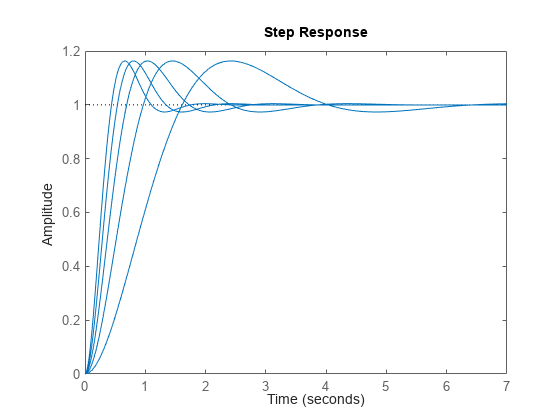
step は、配列内のすべてのエントリの応答に同じライン スタイルを使用します。エントリを区別する 1 つの方法は、動的システム モデルの SamplingGrid プロパティを使用して配列内の各エントリを対応する w0 値に関連付けることです。
sys.SamplingGrid = struct('frequency',w0);次に、応答を MATLAB Figure ウィンドウにプロットする場合は、トレースをクリックして、対応する周波数値を確認できます。
出力引数を指定すると、step は応答データの配列を返します。SISO システムの場合、応答データは、応答がサンプリングされる時間点の数と等しい長さの列ベクトルとして返されます。時間点のベクトルを指定するか、step でシステム ダイナミクスに基づいて時間点が自動的に選択されるようにします。たとえば、t = 0 ~ t = 5 秒の間の 101 の時間点における SISO システムのステップ応答を抽出します。
sys = tf(4,[1 2 10]); t = 0:0.05:5; y = step(sys,t); size(y)
ans = 1×2
101 1
MIMO システムの場合、応答データは次元 N×Ny×Nu の配列で返されます。Ny と Nu は動的システムの出力および入力の数です。たとえば、2 入力、1 出力のシステムを表す、以下の状態空間モデルを考えます。
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
t = 0 ~ t = 20 秒の間の 200 の時間点におけるこのシステムのステップ応答を抽出します。
t = linspace(0,20,200); y = step(sys,t); size(y)
ans = 1×3
200 1 2
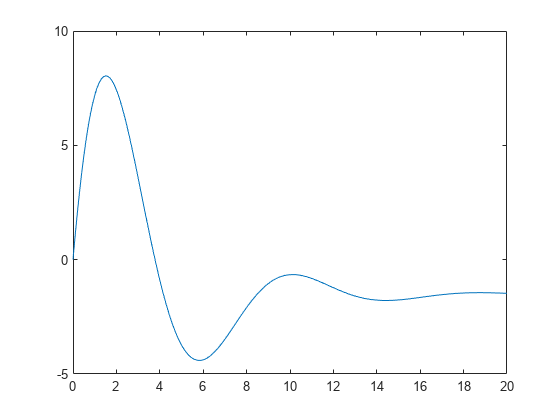
y(:,i,j) は、時間 t における j 番目の入力から i 番目の出力へのステップ応答を含む列ベクトルです。たとえば、2 番目の入力から出力へのステップ応答を抽出します。
y12 = y(:,1,2); plot(t,y12)
遅延をもつフィードバック ループを作成し、そのステップ応答をプロットします。
s = tf('s');
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s);
sys = feedback(ss(G),1);
step(sys)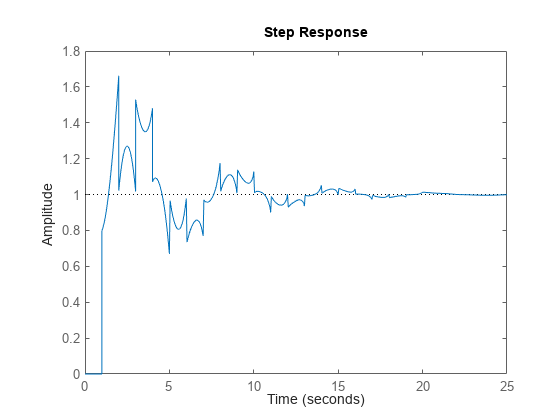
表示されるシステム ステップ応答はカオス的です。内部遅延があるシステムのステップ応答は、再帰ジャンプなど、奇妙な動作をすることがあります。このような動作は、システムの特徴であり、ソフトウェアの異常ではありません。
既定では、step は t = 0 で 0 から 1 へ変化する入力信号を適用します。振幅とバイアスをカスタマイズするには、RespConfig を使用します。たとえば、t = 0 で 1 から –1 へ変化する信号に対する SISO 状態空間モデルの応答を計算します。
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;
sys = ss(A,B,C,D,0.2);
opt = RespConfig;
opt.Bias = 1;
opt.Amplitude = -2;
step(sys,opt)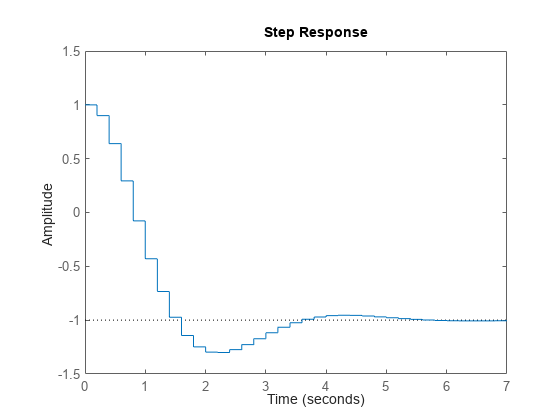
任意の入力信号への応答には、lsimを使用します。
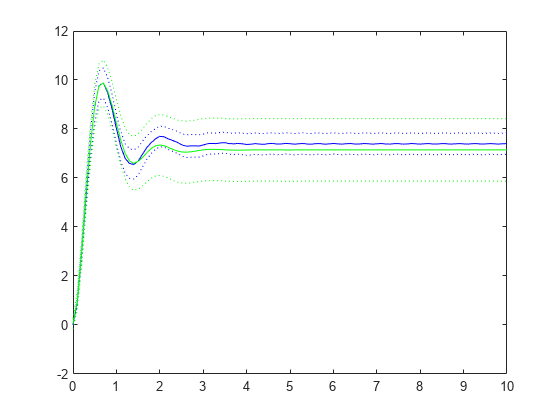
パラメトリックと同定されたモデルのステップ応答を、ノンパラメトリック (実測) モデルのステップ応答と比較します。また、3 の信頼領域も表示します。
データを読み込みます。
load iddata1 z1
パラメトリック モデルを推定します。
sys1 = ssest(z1,4);
ノンパラメトリック モデルを推定します。
sys2 = impulseest(z1);
比較用にステップ応答をプロットします。
t = (0:0.1:10)'; [y1, ~, ~, ysd1] = step(sys1,t); [y2, ~, ~, ysd2] = step(sys2,t); plot(t, y1, 'b', t, y1+3*ysd1, 'b:', t, y1-3*ysd1, 'b:') hold on plot(t, y2, 'g', t, y2+3*ysd2, 'g:', t, y2-3*ysd2, 'g:')
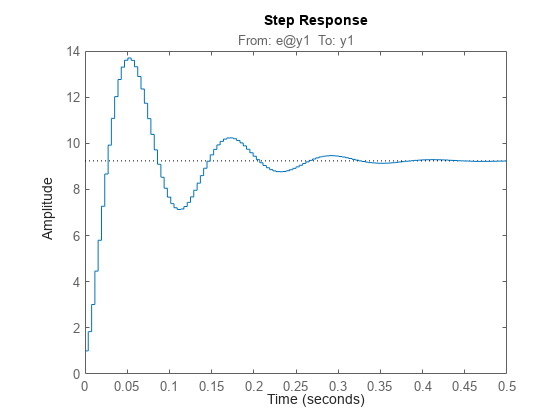
同定された時系列モデルのステップ応答を計算します。
時系列モデルは信号モデルとも呼ばれ、測定される入力信号がありません。このモデルのステップ図はその (測定されていない) ノイズ チャネルを入力チャネルに使用して、ステップ信号を適用します。
データを読み込みます。
load iddata9;時系列モデルを推定します。
sys = ar(z9, 4);
sys は形式 A y(t) = e(t) のモデルで、e(t) はノイズ チャネルを表します。ステップ応答の計算のため、e(t) は入力チャネルとして扱われ、e@y1 という名前が付きます。
ステップ応答をプロットします。
step(sys)
非線形 ARX モデルの線形化を検証するために、線形モデルと非線形モデルの小振幅のステップ応答を比較します。
データを読み込みます。
load iddata2 z2;
非線形 ARX モデルを推定します。
nlsys = nlarx(z2,[4 3 10],idTreePartition,'custom',... {'sin(y1(t-2)*u1(t))+y1(t-2)*u1(t)+u1(t).*u1(t-13)',... 'y1(t-5)*y1(t-5)*y1(t-1)'},'nlr',[1:5, 7 9]);
定常状態入力値の 1 に対応する nlsys の平衡操作点を特定します。
u0 = 1;
[X,~,r] = findop(nlsys, 'steady', 1);
y0 = r.SignalLevels.Output;この操作点での nlsys の線形近似を取得します。
sys = linearize(nlsys,u0,X);
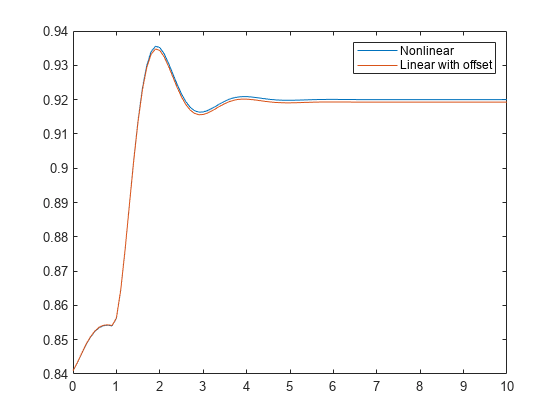
小振幅のステップ応答を nlsys と比較することにより、sys の有効性を検証します。
非線形システム nlsys は、(u0,y0) によって決められた平衡レベルで動作しています。この定常状態について、サイズ 0.1 のステップ摂動を導入し、対応する応答を計算します。
opt = RespConfig; opt.InputOffset = u0; opt.Amplitude = 0.1; t = (0:0.1:10)'; ynl = step(nlsys, t, opt);
線形システム sys は入力の摂動と対応する出力の摂動の関係を表します。非線形システムの平衡値については認識しません。
線形システムのステップ応答をプロットします。
opt = RespConfig; opt.Amplitude = 0.1; yl = step(sys, t, opt);
定常状態オフセット y0 を線形システムの応答に追加し、応答をプロットします。
plot(t, ynl, t, yl+y0) legend('Nonlinear', 'Linear with offset')
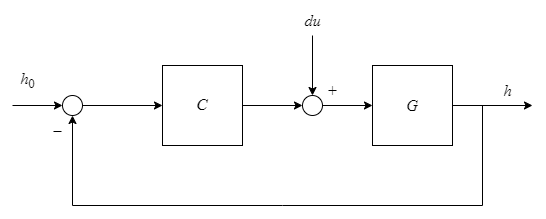
LPV (lpvss) モデルのステップ応答を計算してプロットします。この例では、fcnMaglev.m で定義された浮遊するボールのモデルの外乱 に対する閉ループ ステップ応答をシミュレートします。
モデルを作成し、離散化します。
hmin = 0.05; hmax = 0.25; h0 = (hmin+hmax)/2; Ts = 0.01; Glpv = lpvss("h",@fcnMaglev,0,0,h0); Glpvd = c2d(Glpv,Ts,"tustin");
3 つの高さの値について LPV モデルをサンプリングし、PID コントローラーを調整します。
hpid = linspace(hmin,hmax,3);
[Ga,Goffset] = sample(Glpvd,[],hpid);
wc = 50;
Ka = pidtune(Ga,"pidf",wc);
Ka.Tf = 0.01;ゲイン スケジュール PID コントローラーを作成します。
Ka.SamplingGrid = struct("h",hpid); Koffset = struct("y",{Goffset.u}); Clpv = ssInterpolant(ss(Ka),Koffset);
閉ループ モデルを作成します。
CL = feedback(Glpvd*[1,Clpv],1,2,1);
CL.InputName = {'du';'href'};
CL.OutputName = "h";= の定常状態電流を取得して、プラント入力のステップ外乱に適切なサイズを計算します。
[~,~,~,~,~,~,~,u0] = Glpv.DataFunction(0,h0);
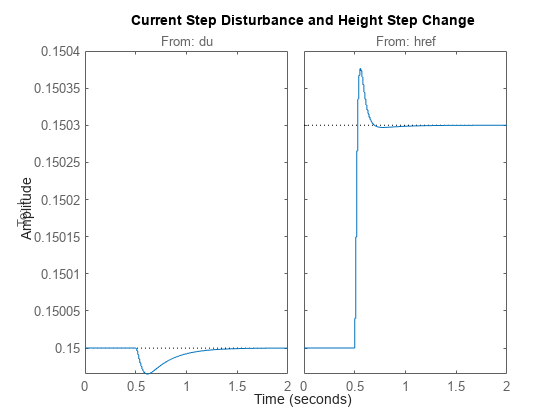
入力外乱に対する応答と基準でのステップ変化を計算してプロットします。ベースライン入力信号 = 0 と = を設定して、定常状態開始条件を指定します。
t = 0:Ts:2; pFcn = @(k,x,u) x(1); Config = RespConfig( ... Bias=[0;h0], ... Amplitude=0.2*[u0;h0]*Ts, ... Delay=0.5, ... InitialParameter=h0); step(CL,t,pFcn,Config) title("Current Step Disturbance and Height Step Change")
複素係数をもつ状態空間モデルを作成します。
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
システムのステップ応答を計算します。
[y,t] = step(sys);
結果の応答データには複素数の出力値が含まれます。
y
y = 369×1 complex
0.0000 + 0.0000i
0.0018 + 0.0075i
0.0079 + 0.0286i
0.0191 + 0.0612i
0.0360 + 0.1033i
0.0588 + 0.1531i
0.0874 + 0.2089i
0.1215 + 0.2690i
0.1609 + 0.3320i
0.2048 + 0.3969i
0.2528 + 0.4624i
0.3041 + 0.5279i
0.3580 + 0.5925i
0.4138 + 0.6558i
0.4708 + 0.7173i
⋮
入力引数
出力引数
ヒント
アルゴリズム
内部遅延のない連続時間モデルのサンプルを取得するために、step はそのモデルを状態空間モデルに変換し、入力のゼロ次ホールドを使用してそれらのモデルを離散化します。step では、入力時間ベクトル t を t = T0:dt:Tf 形式で指定した場合を除き、システム ダイナミクスに基づいてこの離散化にサンプリング時間が自動的に選択されます。その場合、step は dt をサンプリング時間として指定します。結果として得られるシミュレーション タイム ステップ tOut は、間隔 dt で等間隔にサンプリングされます。
内部遅延があるシステムの場合、Control System Toolbox™ ソフトウェアは可変ステップ ソルバーを使用します。その結果、タイム ステップ tOut は等間隔にサンプリングされません。
参照
[1] L.F. Shampine and P. Gahinet, "Delay-differential-algebraic equations in control theory," Applied Numerical Mathematics, Vol. 56, Issues 3–4, pp. 574–588.