適応イコライザー
適応イコライザー構造は伝播チャネル特性の時間変動に対する準最適イコライズを提供します。しかし、このイコライザーは計算量が MLSE イコライザーより少ないため効果的です。
Communications Toolbox™ では、comm.LinearEqualizer および comm.DecisionFeedbackEqualizer の System object と Linear Equalizer および Decision Feedback Equalizer のブロックが、タップ付き遅延線フィルターを使用して、分散チャネルを介して線形変調信号をイコライズします。これらの機能は、有限入力応答 (FIR) フィルターとしてモデル化されたチャネルの推定を使用して、信号の推定を出力します。
受信信号を復号化するために、適応イコライザーは以下を実行します。
入力信号内のシンボルに FIR フィルターを適用します。FIR フィルターのタップ重みはチャネル推定に対応します。
信号の推定を出力し、信号の推定を使用して次のシンボルのタップ重みを更新します。信号の推定と重みの更新は、適応イコライザー構造とアルゴリズムによって異なります。
適応イコライザー構造のオプションは、線形または判定フィードバックです。適応アルゴリズムのオプションは、最小平均二乗 (LMS)、再帰的平均二乗 (RMS)、または定包絡線基準アルゴリズム (CMA) です。適応イコライザーに関する参考文献は、イコライザーについての参考文献を参照してください。
タップ数
線形イコライザーのタップ数は、シンボルあたりの入力サンプル数以上でなければなりません。判定フィードバック イコライザーのフォワード タップ数は、シンボルあたりの入力サンプル数以上でなければなりません。
シンボル タップ間隔
シンボル間隔イコライザーまたは分数シンボル間隔イコライザーとして動作するようにイコライザーを構成できます。
シンボル間隔レートでイコライザーを動作させるには、シンボルあたりのサンプル数を
1に指定します。シンボル レート イコライザーでは、タップはシンボル区間の間隔で配置されます。シンボル レート イコライザーはタイミング位相の影響を受けます。分数シンボル間隔レートでイコライザーを動作させるには、シンボルあたりの入力サンプル数を
1より大きい整数に指定し、そのサンプル レートでオーバーサンプリングされた入力信号を指定します。分数シンボル間隔イコライザーでは、入力シンボル区間の整数分の 1 の間隔でタップが配置されています。分数シンボル間隔イコライザーはタイミング位相の影響を受けません。
メモ
MLSE イコライザーは非整数のシンボル間隔をサポートしていますが、使用は推奨されません。MLSE の計算量と負荷は、チャネルの時間分散の長さと共に指数関数的に増大します。入力のオーバーサンプリングは、指数項にシンボルあたりのサンプル数を乗算することを意味します。
線形イコライザー
線形イコライザーは、チャネルの周波数応答に null が存在しない場合、符号間干渉 (ISI) を削除できます。チャネルの周波数応答に null が存在する場合、線形イコライザーはノイズを強調する傾向があります。この場合は、ノイズが強調されないように判定フィードバック イコライザーを使用します。
線形イコライザーは、入力信号からのサンプルを格納するタップ付き遅延線で構成されます。シンボル周期ごとに一度、イコライザーは遅延ラインで値の重み付き総和を出力し、次のシンボル周期のための準備として重みを更新します。
線形イコライザーはシンボル間隔または分数シンボル間隔にすることができます。
シンボル間隔イコライザーの場合、シンボルあたりのサンプル数 K は 1 です。出力サンプル レートは入力サンプル レートと等しくなります。
分数シンボル間隔イコライザーの場合、シンボルあたりのサンプル数 K は 1 より大きい整数です。通常、分数間隔イコライザーの K は 4 です。出力サンプルレートは 1/T、入力サンプルレートは K/T になります。ここで、T はシンボル周期です。タップ重みの更新は、出力レートで起こります。
この図は、重みが L、シンボル周期が T、シンボルあたりのサンプル数が K の線形イコライザーを示しています。K が 1 の場合、結果は分数シンボル間隔線形イコライザーではなくシンボル間隔線形イコライザーです。

シンボル周期ごとに、イコライザーはタップ付き遅延線で K 個の入力サンプルを受信します。イコライザーはその後、遅延線で値の重み付き総和を出力し、次のシンボル周期のための準備として重みを更新します。
判定フィードバック イコライザー
判定フィードバック イコライザー (DFE) は、周波数選択性チャネルでの符号間干渉 (ISI) を軽減する非線形イコライザーです。チャネルの周波数応答に null が存在する場合、DFE はノイズを強調しません。DFE は、入力信号からのサンプルを格納し、フォワード フィルターとフィードバック フィルターを含む、タップ付き遅延線で構成されます。フォワード フィルターは、線形イコライザーに類似しています。フィードバック フィルターは、入力がイコライズされた信号に行われる判定であるようなタップ付き遅延線を含みます。シンボル周期ごとに一度、イコライザーは遅延ラインで値の重み付き総和を出力し、次のシンボル周期のための準備として重みを更新します。
DFE はシンボル間隔または分数シンボル間隔にすることができます。
シンボル間隔イコライザーの場合、シンボルあたりのサンプル数 K は 1 です。出力サンプル レートは入力サンプル レートと等しくなります。
分数シンボル間隔イコライザーの場合、シンボルあたりのサンプル数 K は 1 より大きい整数です。通常、分数シンボル間隔イコライザーの K は 4 です。出力サンプルレートは 1/T、入力サンプルレートは K/T になります。タップ重みの更新は、出力レートで起こります。
この図は、合計 N 個の重みをもち、シンボル周期が T で、シンボルあたりのサンプル数が K 個の分数シンボル間隔 DFE を示しています。フィルターには、L 個のフォワードの重みと N-L 個のフィードバックの重みがあります。フォワード フィルターは最上部にあり、フィードバック フィルターは最下部にあります。K が 1 の場合、結果は分数シンボル間隔 DFE ではなくシンボル間隔 DFE です。

各シンボル周期において、イコライザーは、フォワード フィルターで K 個の入力サンプルを受信し、フィードバック フィルターで 1 つの判定またはトレーニング サンプルを受信します。それから、イコライザーは、フォワードおよびフィードバック遅延線に、値の重み付き総和を出力し、重みを更新して次のシンボル周期に備えます。
メモ
図の Adaptive Algorithm ブロックに対するアルゴリズムは、フォワードおよびフィードバックの重みを同時に最適化します。同時最適化は、再帰的最小二乗 (RLS) アルゴリズムの収束のために特に重要です。
基準信号と操作モード
既定のアプリケーションにおいて、イコライザーはまずトレーニング モードで動作してチャネルについての情報を集めます。イコライザーは後で判定指向モードに切り替わります。
イコライザーがトレーニング モードで動作している場合、基準信号は前もって設定された既知の送信されたシーケンスです。
イコライザーが判定指向モードで動作している場合、基準信号は検出された出力信号となり、図では yd で示されます。
CMA アルゴリズムにはトレーニング モードがありません。トレーニング モードは、イコライザーが LMS または RLS アルゴリズムを使用するように構成されている場合にのみ適用されます。
誤りを計算
誤りを計算する操作は、次の式で与えられる信号を生成します。ここで、R は信号コンスタレーションに関連する定数です。
タップ重みの更新
線形および判定フィードバックのイコライザー構造の場合、LMS、RLS、または CMA の選択によって、タップ重みの設定と誤り計算の実行に使用されるアルゴリズムが決まります。新しいタップ重みのセットは、以下に応じて異なります。
現在のタップ重みのセット
入力信号
出力信号
LMS および RLS 適応アルゴリズムの場合のみ、基準信号 d。基準信号の特性は、イコライザーの操作モードによって異なります。
最小平均二乗アルゴリズム
LMS アルゴリズムの場合、前の図の w はすべての重み wi のベクトル、u はすべての入力 ui のベクトルです。現在の重み集合に基づき、LMS アルゴリズムは次の式で新しい重み集合を作成します。
wnew = wcurrent + (StepSize) ue*.
適応アルゴリズムで使用されるステップ サイズは、正のスカラーとして指定します。ステップ サイズを大きくすると、イコライザーの収束時間が短縮されますが、イコライズされた出力信号の安定性は低下します。LMS 適応アルゴリズムを使用する際に許容される最大ステップ サイズを決定するには、オブジェクト関数 maxstep を使用します。* 演算子は複素共役を表し、誤り計算は e = d - y を表します。
再帰的最小二乗アルゴリズム
RLS アルゴリズムの場合、前の図の w はすべての重み wi のベクトル、u はすべての入力 ui のベクトルです。現在の入力の集合 u と逆相関行列 P を基に、RLS アルゴリズムは最初にカルマン ゲイン ベクトル K を次のように計算します。
適応アルゴリズムで使用される忘却係数は、範囲 (0, 1] のスカラーとして指定します。忘却係数を小さくすると、イコライザーの収束時間が短縮されますが、イコライズされた出力信号の安定性は低下します。H はエルミート転置を表します。現在の逆相関行列に基づき、新しい逆相関行列は次のようになります。
現在の重み集合に基づき、RLS アルゴリズムは次の式で新しい重み集合を作成します。
wnew = wcurrent+K*e.
* 演算子は複素共役を表し、誤り計算は e = d - y を表します。
定包絡線基準アルゴリズム
CMA 適応アルゴリズムの場合、前の図の w はすべての重み wi のベクトル、u はすべての入力 ui のベクトルです。現在の重み集合に基づき、CMA 適応アルゴリズムは次の式で新しい重み集合を作成します。
wnew = wcurrent + (StepSize) u*e.
適応アルゴリズムで使用されるステップ サイズは、正のスカラーとして指定します。ステップ サイズを大きくすると、イコライザーの収束時間が短縮されますが、イコライズされた出力信号の安定性は低下します。CMA 適応アルゴリズムにより許容される最大ステップ サイズを決定するには、オブジェクト関数 maxstep を使用します。* 演算子は複素共役を表し、誤り計算は e = y(R - |y|2) です。ここで、R は信号コンスタレーションに関連する定数です。
適応イコライザーの構成
線形または判定フィードバックのイコライザー構造を選択します。LMS、RLS、または CMA のうちどの適応アルゴリズムを使用するかを決定します。構造およびアルゴリズム固有の操作モードの設定を指定します。
イコライザーの構成には、線形構造または判定フィードバック構造の選択、適応アルゴリズムの選択、構造およびアルゴリズム固有の操作モードの指定が含まれます。
ニーズに最も合っている適応アルゴリズムを決定する場合、以下を考慮します。
LMS アルゴリズムの実行は高速ですが、収束は低速です。その複雑度は重みの数と共に線形に増大します。
RLS アルゴリズムは迅速に収束します。その複雑度は、重みの数の約 2 乗で増大します。このアルゴリズムは、重みの数が大きい場合、不安定になることがあります。
定包絡線基準アルゴリズム (CMA) はトレーニング信号が利用できない場合に有効です。これは PSK のような定数係数の変調に対して最も良く機能します。
CMA が付加的なサイド情報をもたない場合、位相不確定性を導入できます。たとえば、CMA により求められた重みは完全な QPSK コンスタレーションを作成しますが、90、180、または 270 度の位相回転を導入します。この場合、位相不確定性補正アルゴリズムを採用するか、差分変調スキームを選択します。差分変調スキームは位相不確定性の影響を受けません。
適応イコライザーの任意のプロパティを表示または変更するには、オブジェクト プロパティの表示と変更のチャネル オブジェクトに対して説明した構文を使用します。
適応アルゴリズムの詳細については、イコライザーについての参考文献に記載されている参考文献を参照してください。
適応イコライザーの指定
MATLAB® で使用する適応イコライザー オブジェクトを作成するには、comm.LinearEqualizer または comm.DecisionFeedbackEqualizer System object™ を選択します。Simulink® の場合は、Linear Equalizer または Decision Feedback Equalizer ブロックを使用します。シミュレーションの伝播チャネル特性に基づいて、イコライズの基準を使用してイコライザー構造を選択します。
イコライザー オブジェクトは、イコライザーについての情報を記録する多数のプロパティをもちます。プロパティは、次のものに関連します。
イコライザーの構造 (タップ数など)。
イコライザーが使用する適応アルゴリズム (LMS または CMA アルゴリズムのステップ サイズなど)。
イコライザーの現在の状態に関する情報。イコライザー オブジェクトは重みの値を出力できます。
イコライザー オブジェクトの任意のプロパティを表示または変更するには、オブジェクト プロパティの表示と変更でチャネル オブジェクトに対して説明した構文を使用してください。
イコライザー オブジェクトの定義
次のコードは、以下の構成のイコライザー オブジェクトを作成します。
10 個の重みをもつシンボル間隔線形 RLS イコライザー。
シンボルごとに 10 個の重み、1 つの BPSK コンスタレーション、および 2 つのサンプルをもつ分数間隔線形 RLS イコライザー。
フィードフォワード フィルターに 3 つの重み、フィードバック フィルターに 2 つの重みをもつ判定フィードバック RLS イコライザー。
3 つのイコライザー オブジェクトはすべて忘却係数 0.3 で RLS 適応アルゴリズムを指定。
異なるタイプのイコライザー オブジェクトを作成します。'Name,Value' ペアを使用して設定されていないプロパティには既定の設定が使用されます。
eqlin = comm.LinearEqualizer( ... Algorithm='RLS', ... NumTaps=10, ... ForgettingFactor=0.3)
eqlin =
comm.LinearEqualizer with properties:
Algorithm: 'RLS'
NumTaps: 10
ForgettingFactor: 0.3000
InitialInverseCorrelationMatrix: 0.1000
Constellation: [0.7071 + 0.7071i -0.7071 + 0.7071i -0.7071 - 0.7071i 0.7071 - 0.7071i]
ReferenceTap: 3
InputDelay: 0
InputSamplesPerSymbol: 1
TrainingFlagInputPort: false
AdaptAfterTraining: true
InitialWeightsSource: 'Auto'
WeightUpdatePeriod: 1
eqfrac = comm.LinearEqualizer( ... Algorithm='RLS', ... NumTaps=10, ... ForgettingFactor=0.3, ... Constellation=[-1 1], ... InputSamplesPerSymbol=2)
eqfrac =
comm.LinearEqualizer with properties:
Algorithm: 'RLS'
NumTaps: 10
ForgettingFactor: 0.3000
InitialInverseCorrelationMatrix: 0.1000
Constellation: [-1 1]
ReferenceTap: 3
InputDelay: 0
InputSamplesPerSymbol: 2
TrainingFlagInputPort: false
AdaptAfterTraining: true
InitialWeightsSource: 'Auto'
WeightUpdatePeriod: 1
eqdfe = comm.DecisionFeedbackEqualizer( ... Algorithm='RLS', ... NumForwardTaps=3, ... NumFeedbackTaps=2, ... ForgettingFactor=0.3)
eqdfe =
comm.DecisionFeedbackEqualizer with properties:
Algorithm: 'RLS'
NumForwardTaps: 3
NumFeedbackTaps: 2
ForgettingFactor: 0.3000
InitialInverseCorrelationMatrix: 0.1000
Constellation: [0.7071 + 0.7071i -0.7071 + 0.7071i -0.7071 - 0.7071i 0.7071 - 0.7071i]
ReferenceTap: 3
InputDelay: 0
InputSamplesPerSymbol: 1
TrainingFlagInputPort: false
AdaptAfterTraining: true
InitialWeightsSource: 'Auto'
WeightUpdatePeriod: 1
適応アルゴリズムの割り当て
Algorithm プロパティを使用して、イコライザーで使用される適応アルゴリズムを割り当てます。
アルゴリズムの割り当て
イコライザー オブジェクトを作成するときに適応アルゴリズムを割り当てます。
eqlms = comm.LinearEqualizer('Algorithm','LMS');
既定のプロパティ設定を使用してイコライザー オブジェクトを作成します。LMS が既定の適応アルゴリズムです。
eqrls = comm.LinearEqualizer; eqrls.Algorithm
ans = 'LMS'
eqrls を更新して RLS 適応アルゴリズムを使用します。
eqrls.Algorithm = 'RLS';
eqrls.Algorithmans = 'RLS'
オブジェクトのクローン作成と複製
既存のイコライザー オブジェクトのクローンを作成することで新しいイコライザー オブジェクトを作成してから、そのプロパティを変更します。eqlms のクローンを作成して独立したイコライザー eqcma を作成してから、アルゴリズムを 'CMA' に更新します。
eqcma = clone(eqlms); eqcma.Algorithm
ans = 'LMS'
eqcma.Algorithm = 'CMA';
eqcma.Algorithmans = 'CMA'
独立した複製が必要な場合は、clone コマンドを使用します。
eqlms.NumTaps
ans = 5
eq2 = eqlms; eq2.NumTaps = 6; eq2.NumTaps
ans = 6
eqlms.NumTaps
ans = 6
clone コマンドは、eqlms に依存しない eqlms のコピーを作成します。一方、コマンド eqB = eqA は eqA への参照として eqB を作成するので、eqB と eqA は常に同一のプロパティ設定をもちます。
イコライザーの学習
異なる学習スキームを使用した線形イコライズ システム
最小平均二乗 (LMS) アルゴリズムを使用した線形イコライズを示して、AWGN チャネル経由で渡した QPSK シンボルを復元します。異なるイコライザーの学習スキームを適用して、シンボル エラーの大きさを示します。
システム設定
AWGN の影響を受ける QPSK 変調システムをシミュレートします。200 個のトレーニング シンボルと 1800 個のランダム データ シンボルで構成されるパケットを送信します。パケット データを復元するように線形 LMS イコライザーを構成します。
M = 4; numTrainSymbols = 200; numDataSymbols = 1800; SNR = 20; trainingSymbols = pskmod(randi([0 M-1],numTrainSymbols,1),M,pi/4); numPkts = 10; lineq = comm.LinearEqualizer( ... Algorithm="LMS", ... NumTaps=5, ... ReferenceTap=3, ... StepSize=0.01);
リセットを使用する各パケットの先頭でのイコライザーの学習
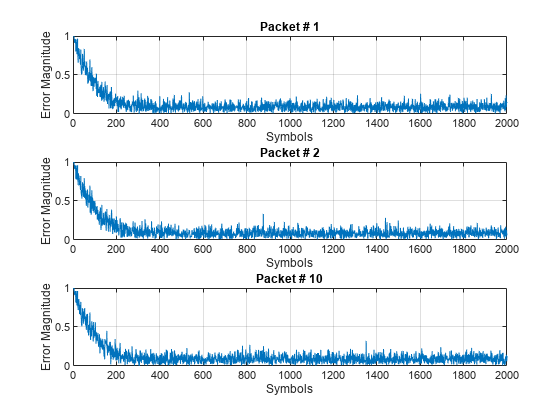
各パケットを処理するときに、先頭に追加されたトレーニング シンボルを使用します。各パケットの処理後にイコライザーをリセットします。このリセットにより、イコライザーは事前知識なしにタップを学習するようになります。最初、2 番目、および最後のパケットのイコライザー誤差信号プロットは、各パケットの先頭でシンボル エラーが多くなっていることを示しています。
jj = 1; figure for ii = 1:numPkts b = randi([0 M-1],numDataSymbols,1); dataSym = pskmod(b,M,pi/4); packet = [trainingSymbols;dataSym]; rx = awgn(packet,SNR); [~,err] = lineq(rx,trainingSymbols); reset(lineq) if (ii ==1 || ii == 2 ||ii == numPkts) subplot(3,1,jj) plot(abs(err)) title(['Packet # ',num2str(ii)]) xlabel('Symbols') ylabel('Error Magnitude') axis([0,length(packet),0,1]) grid on; jj = jj+1; end end
リセットを使用しない各パケットの先頭でのイコライザーの学習
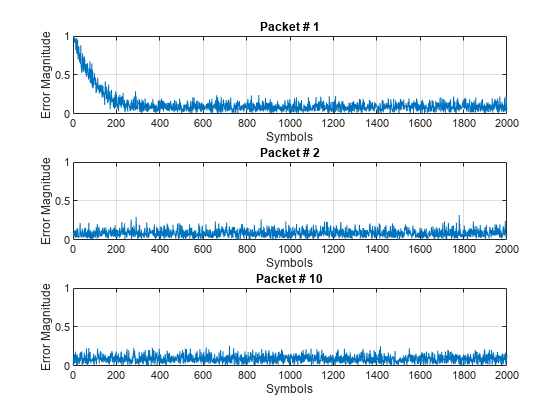
先頭に追加されたトレーニング シンボルを使用して各パケットを処理します。各パケットの処理後にイコライザーをリセットしません。各パケットの後にリセットしないことで、イコライザーは前のパケットの学習によるタップ重みを保持します。最初、2 番目、および最後のパケットのイコライザー誤差信号プロットは、最初のパケットに対する初期学習の後に、後続のパケットが各パケットの先頭でシンボル エラーが少なくなることを示しています。
release(lineq) jj = 1; figure for ii = 1:numPkts b = randi([0 M-1],numDataSymbols,1); dataSym = pskmod(b,M,pi/4); packet = [trainingSymbols;dataSym]; channel = 1; rx = awgn(packet*channel,SNR); [~,err] = lineq(rx,trainingSymbols); if (ii ==1 || ii == 2 ||ii == numPkts) subplot(3,1,jj) plot(abs(err)) title(['Packet # ',num2str(ii)]) xlabel('Symbols') ylabel('Error Magnitude') axis([0,length(packet),0,1]) grid on; jj = jj+1; end end
周期的なイコライザーの学習
時変チャネルの影響を受ける信号があるシステムには、チャネル変動に対してロックを維持するために周期的なイコライザーの学習が必要です。1800 個のデータ シンボルごとに 200 個のシンボルの学習を行うシステムを指定します。学習の合間では、イコライザーはタップ重みを更新しません。イコライザーはパケットあたり 200 個のシンボルを処理します。
Rs = 1e6;
fd = 20;
spp = 200; % Symbols per packet
b = randi([0 M-1],numDataSymbols,1);
dataSym = pskmod(b,M,pi/4);
packet = [trainingSymbols; dataSym];
stream = repmat(packet,10,1);
tx = (0:length(stream)-1)'/Rs;
channel = exp(1i*2*pi*fd*tx);
rx = awgn(stream.*channel,SNR);AdaptAfterTraining プロパティを false に設定して、学習フェーズの後にイコライザーのタップ重みの更新を停止します。
release(lineq) lineq.AdaptAfterTraining = false
lineq =
comm.LinearEqualizer with properties:
Algorithm: 'LMS'
NumTaps: 5
StepSize: 0.0100
Constellation: [0.7071 + 0.7071i -0.7071 + 0.7071i -0.7071 - 0.7071i 0.7071 - 0.7071i]
ReferenceTap: 3
InputDelay: 0
InputSamplesPerSymbol: 1
TrainingFlagInputPort: false
AdaptAfterTraining: false
InitialWeightsSource: 'Auto'
WeightUpdatePeriod: 1
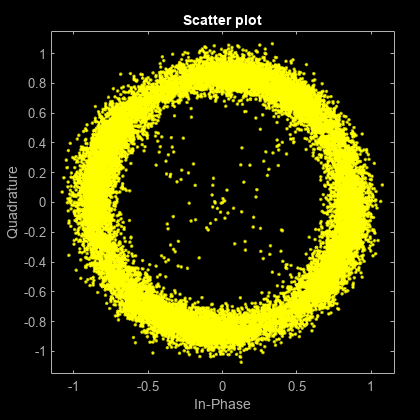
劣化したデータをイコライズします。チャネルからの角度誤差、イコライザーの誤差信号、および信号コンスタレーションをプロットします。チャネルが変動しても、イコライザー出力からチャネルの影響は除去されません。出力コンスタレーションが同期せずに回転し、ビット エラーが発生します。
[y,err] = lineq(rx,trainingSymbols); figure subplot(2,1,1) plot(tx, unwrap(angle(channel))) xlabel('Time (sec)') ylabel('Channel Angle (rad)') title('Angular Error Over Time') subplot(2,1,2) plot(abs(err)) xlabel('Symbols') ylabel('Error Magnitude') grid on title('Time-Varying Channel Without Retraining')

scatterplot(y)
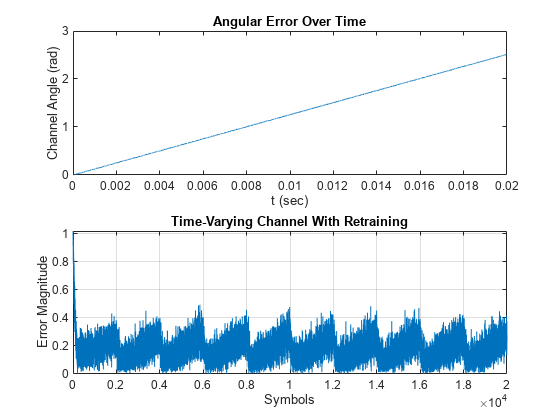
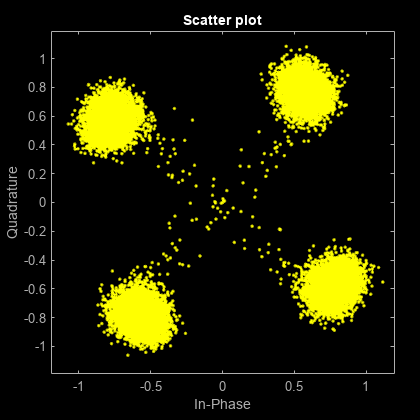
TrainingInputPort プロパティを true に設定し、trainFlag 入力により信号が送られたときにタップを再学習するようにイコライザーを構成します。イコライザーは、trainFlag が true の場合にのみ学習を行います。イコライザーは 2000 個のシンボルごとにタップを再学習し、チャネルの変動に対してロックを維持します。チャネルからの角度誤差、イコライザーの誤差信号、および信号コンスタレーションをプロットします。チャネルが変動すると、イコライザー出力からチャネルの影響が除去されます。出力コンスタレーションが同期せずに回転することがなくなり、ビット エラーが減少します。
release(lineq) lineq.TrainingFlagInputPort = true; symbolCnt = 0; numPackets = length(rx)/spp; trainFlag = true; trainingPeriod = 2000; eVec = zeros(size(rx)); yVec = zeros(size(rx)); for p=1:numPackets [yVec((p-1)*spp+1:p*spp,1),eVec((p-1)*spp+1:p*spp,1)] = ... lineq(rx((p-1)*spp+1:p*spp,1),trainingSymbols,trainFlag); symbolCnt = symbolCnt + spp; if symbolCnt >= trainingPeriod trainFlag = true; symbolCnt = 0; else trainFlag = false; end end figure subplot(2,1,1) plot(tx, unwrap(angle(channel))) xlabel('t (sec)') ylabel('Channel Angle (rad)') title('Angular Error Over Time') subplot(2,1,2) plot(abs(eVec)) xlabel('Symbols') ylabel('Error Magnitude') grid on title('Time-Varying Channel With Retraining')
scatterplot(yVec)
EVM ベースの学習を使用したシンボルの線形イコライズ
定包絡線基準アルゴリズム (CMA) と EVM ベースのタップの学習を使用して、線形イコライザーで QPSK シンボルを復元します。CMA などのブラインド イコライザー アルゴリズムを使用する場合は、AdaptWeights プロパティを使用して学習を開始および停止することによって、イコライザーのタップを学習させます。補助関数を使用してプロットを生成し、位相補正を適用します。
システム変数を初期化します。
rng(123456); M = 4; % QPSK numSymbols = 100; numPackets = 5000; raylChan = comm.RayleighChannel( ... 'PathDelays',[0 1], ... 'AveragePathGains',[0 -12], ... 'MaximumDopplerShift',1e-5); SNR = 50; adaptWeights = true;
イコライザーおよび EVM の System object を作成します。イコライザー System object は、CMA 適応アルゴリズムを使用して線形イコライザーを指定します。補助関数を呼び出して Figure のプロットを初期化します。
lineq = comm.LinearEqualizer( ... 'Algorithm','CMA', ... 'NumTaps',5, ... 'ReferenceTap',3, ... 'StepSize',0.03, ... 'AdaptWeightsSource','Input port')
lineq =
comm.LinearEqualizer with properties:
Algorithm: 'CMA'
NumTaps: 5
StepSize: 0.0300
Constellation: [0.7071 + 0.7071i -0.7071 + 0.7071i -0.7071 - 0.7071i 0.7071 - 0.7071i]
ReferenceTap: 3
InputSamplesPerSymbol: 1
AdaptWeightsSource: 'Input port'
InitialWeightsSource: 'Auto'
WeightUpdatePeriod: 1
info(lineq)
ans = struct with fields:
Latency: 2
evm = comm.EVM('ReferenceSignalSource', ... 'Estimated from reference constellation'); [errPlot,evmPlot,scatSym,adaptState] = ... initFigures(numPackets,lineq);
イコライズ ループ
イコライズ ループを実装するには、以下の手順に従います。
PSK データ パケットを生成します。
レイリー フェージングと AWGN を送信データに適用します。
受信データにイコライズを、イコライザー出力に位相補正を適用します。
EVM を推定し、EVM レベルに基づいて
adaptWeightsフラグをtrueまたはfalseに切り替えます。Figure のプロットを更新します。
for p=1:numPackets data = randi([0 M-1],numSymbols,1); tx = pskmod(data,M,pi/4); rx = awgn(raylChan(tx),SNR); rxDelay = finddelay(rx,tx); [y,err,wts] = lineq(rx,adaptWeights); y = phaseCorrection(y); evmEst = evm(y); adaptWeights = (evmEst > 20); updateFigures(errPlot,evmPlot,scatSym,adaptState, ... wts,y(end),evmEst,adaptWeights,p,numPackets) end
rxDelay
rxDelay = 0
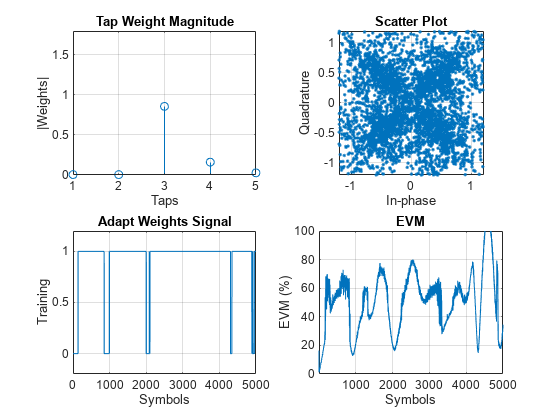
Figure のプロットは、EVM が変化するにつれて、イコライザーが判定指向の重み適応モードのオンとオフを切り替えていることを示しています。
補助関数
この補助関数は、シミュレーション結果の 4 つのプロットを示す Figure を初期化します。
function [errPlot,evmPlot,scatter,adaptState] = ... initFigures(numPkts,lineq) yVec = nan(numPkts,1); evmVec = nan(numPkts,1); wVec = zeros(lineq.NumTaps,1); adaptVec = nan(numPkts,1); figure subplot(2,2,1) evmPlot = stem(wVec); grid on; axis([1 lineq.NumTaps 0 1.8]) xlabel('Taps'); ylabel('|Weights|'); title('Tap Weight Magnitude') subplot(2,2,2) scatter = plot(yVec, '.'); axis square; axis([-1.2 1.2 -1.2 1.2]); grid on xlabel('In-phase'); ylabel('Quadrature'); title('Scatter Plot'); subplot(2,2,3) adaptState = plot(adaptVec); grid on; axis([0 numPkts -0.2 1.2]) ylabel('Training'); xlabel('Symbols'); title('Adapt Weights Signal') subplot(2,2,4) errPlot = plot(evmVec); grid on; axis([1 numPkts 0 100]) xlabel('Symbols'); ylabel('EVM (%)'); title('EVM') end
この補助関数は Figure を更新します。
function updateFigures(errPlot,evmPlot,scatSym, ... adaptState,w,y,evmEst,adaptWts,p,numFrames) persistent yVec evmVec adaptVec if p == 1 yVec = nan(numFrames,1); evmVec = nan(numFrames,1); adaptVec = nan(numFrames,1); end yVec(p) = y; evmVec(p) = evmEst; adaptVec(p) = adaptWts; errPlot.YData = abs(evmVec); evmPlot.YData = abs(w); scatSym.XData = real(yVec); scatSym.YData = imag(yVec); adaptState.YData = adaptVec; drawnow limitrate end
この補助関数は位相補正を適用します。
function y = phaseCorrection(y) a = angle(y((real(y) > 0) & (imag(y) > 0))); a(a < 0.1) = a(a < 0.1) + pi/2; theta = mean(a) - pi/4; y = y * exp(-1i*theta); end
イコライザーを使用する際の遅延の管理
適切にイコライズするには、システム遅延を求めて考慮しなければなりません。次の例に示すように、関数 finddelay を使用してシステム遅延を求めることができます。この例では LMS 線形イコライズを使用していますが、同じ方法が RLS および CMA 適応アルゴリズムと判定フィードバック イコライザーにも有効です。
遅延信号の線形イコライズ
送信シンボルと受信サンプルの間に遅延があるシステムをシミュレートします。一般的なシステムには送信側と受信側のフィルターがあり、これにより遅延が発生します。システムを同期させるには、この遅延を考慮しなければなりません。この例では、送信フィルターと受信フィルターを使用せずにシステム遅延が発生しています。線形イコライズは、最小平均二乗 (LMS) アルゴリズムを使用して、QPSK シンボルを復元します。
シミュレーション変数を初期化します。
M = 4; % QPSK
numSymbols = 10000;
numTrainingSymbols = 1000;
mpChan = [1 0.5*exp(1i*pi/6) 0.1*exp(-1i*pi/8)];
systemDelay = dsp.Delay(20);
snr = 24;QPSK 変調されたシンボルを生成します。送信シンボルにマルチパス チャネルのフィルター処理、システム遅延、および AWGN を適用します。
data = randi([0 M-1],numSymbols,1); tx = pskmod(data,M,pi/4); % OQPSK delayedSym = systemDelay(filter(mpChan,1,tx)); rx = awgn(delayedSym,snr,'measured');
イコライザーおよび EVM の System object を作成します。イコライザー System object は、LMS アルゴリズムを使用する線形イコライザーを指定します。
lineq = comm.LinearEqualizer('Algorithm','LMS', ... 'NumTaps',9,'ReferenceTap',5); evm = comm.EVM('ReferenceSignalSource', ... 'Estimated from reference constellation');
入力遅延を調整しないイコライズ
受信シンボルをイコライズします。
[y1,err1,wts1] = lineq(rx,tx(1:numTrainingSymbols,1));
関数 finddelay を使用して、受信シンボルと送信シンボルの間の遅延を検出します。
rxDelay = finddelay(tx,rx)
rxDelay = 20
イコライザー情報を表示します。レイテンシ値は、イコライザーによって発生した遅延を示します。合計遅延を、rxDelay とイコライザーのレイテンシの合計として計算します。
eqInfo = info(lineq)
eqInfo = struct with fields:
Latency: 4
totalDelay = rxDelay + eqInfo.Latency;
イコライザー出力が収束するまで、シンボル エラー レートは高くなります。誤り出力 err1 をプロットして、イコライズされた出力がいつ収束するかを判断します。
plot(abs(err1)) xlabel('Symbols') ylabel('Error Magnitude') title('Equalizer Error Signal')
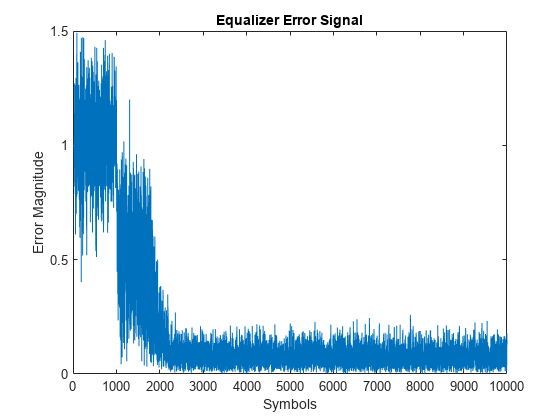
このプロットでは、1000 個のシンボルの学習期間を超えて過度な誤りが示されています。シンボルを復調してシンボル エラーを計算するときは、収束していない出力と、イコライザー出力と送信シンボルの間のシステム遅延を考慮して、最初の 2000 個のシンボルをスキップします。
dataRec1 = pskdemod(y1(2000+totalDelay:end),M,pi/4); symErrWithDelay = symerr(data(2000:end-totalDelay),dataRec1)
symErrWithDelay = 5999
evmWithDelay = evm(y1)
evmWithDelay = 32.0802
イコライザー System object で受信遅延が考慮されていないため、エラー レートと EVM が高くなります。
イコライザーでの入力遅延の調整
遅延値を使用して InputDelay プロパティを設定し、受信データをイコライズします。InputDelay は調整できないプロパティであるため、InputDelay プロパティを再構成するには lineq System object を解放しなければなりません。受信シンボルをイコライズします。
release(lineq) lineq.InputDelay = rxDelay
lineq =
comm.LinearEqualizer with properties:
Algorithm: 'LMS'
NumTaps: 9
StepSize: 0.0100
Constellation: [0.7071 + 0.7071i -0.7071 + 0.7071i -0.7071 - 0.7071i 0.7071 - 0.7071i]
ReferenceTap: 5
InputDelay: 20
InputSamplesPerSymbol: 1
TrainingFlagInputPort: false
AdaptAfterTraining: true
InitialWeightsSource: 'Auto'
WeightUpdatePeriod: 1
[y2,err2,wts2] = lineq(rx,tx(1:numTrainingSymbols,1));
タップ重みとイコライズされた誤差の大きさをプロットします。ステム プロットは、システム遅延が除去される前後のイコライザーのタップ重みを示します。2 次元ライン プロットは、遅延が除去された信号と比較して、遅延信号のイコライザー収束が遅いことを示しています。
subplot(2,1,1) stem([real(wts1),real(wts2)]) xlabel('Taps') ylabel('Tap Weight Real') legend('rxDelayed','rxDelayRemoved') grid on subplot(2,1,2) stem([imag(wts1),imag(wts2)]) xlabel('Taps') ylabel('Tap Weight Imaginary') legend('rxDelayed','rxDelayRemoved') grid on
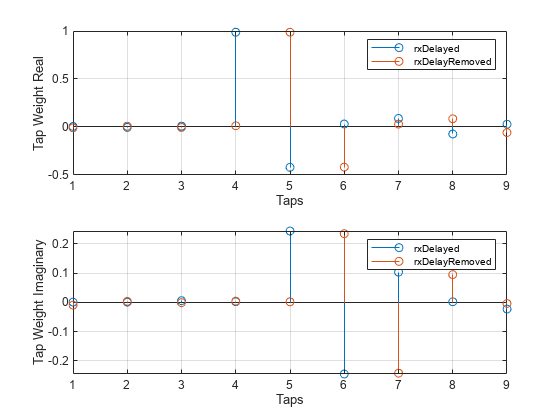
figure plot([abs(err1),abs(err2)]) xlabel('Symbols') ylabel('Error Magnitude') legend('rxDelayed','rxDelayRemoved') grid on
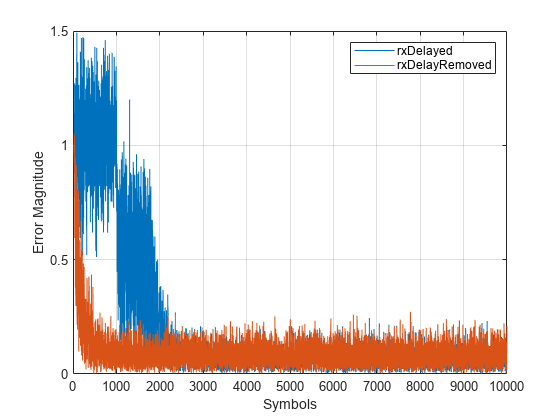
イコライズされた信号 rxDelayed および rxDelayRemoved の誤り出力をプロットします。遅延が除去された信号では、イコライザーは 1000 個のシンボルの学習期間中に収束します。シンボルを復調してシンボル エラーを計算するときは、収束していない出力と、イコライザー出力と送信シンボルの間のシステム遅延を考慮して、最初の 500 個のシンボルをスキップします。システム遅延を考慮するためにイコライザーを再構成すると、信号のイコライズが改善され、シンボル エラーと EVM が減少します。
eqInfo = info(lineq)
eqInfo = struct with fields:
Latency: 4
totalDelay = rxDelay + eqInfo.Latency; dataRec2 = pskdemod(y2(500+totalDelay:end),M,pi/4); symErrDelayRemoved = symerr(data(500:end-totalDelay),dataRec2)
symErrDelayRemoved = 0
evmDelayRemoved = evm(y2(500+totalDelay:end))
evmDelayRemoved = 9.4364
Simulink での適応イコライザーの利用
フィルター処理とフェージング チャネルによる適応イコライズ
このモデルでは、フェージング チャネルのある通信リンクでの、選択された適応イコライザーの動作を示します。送信側と受信側は、ルート レイズド コサインのパルス整形フィルター処理を行います。subsystem ブロックにより、最小平均二乗 (LMS) または再帰的最小二乗 (RLS) 適応アルゴリズムを使用する、線形イコライザーまたは判定フィードバック イコライザーを選択できます。
モデルの構造
送信機は、トレーニング シーケンスを含む 16QAM のランダムな信号データを生成し、ルート レイズド コサインのパルス整形フィルター処理を適用します。
チャネル障害には、マルチパス フェージング、ドップラー シフト、搬送波周波数オフセット、可変整数遅延、自由空間パス損失、および AWGN が含まれます。
受信機は、ルート レイズド コサインのパルス整形フィルター処理を適用し、ゲインを調整し、イコライザー モード コントロールを含めてトレーニングを有効にすることで、以下の選択肢からのイコライザー アルゴリズムの選択を可能にします。

スコープは、さまざまなイコライザーと適応アルゴリズムがどのように動作するかを理解するのに役立ちます。
モデル例の調査

モデルを試す
このモデルには、設定を変更して結果を観察するためのいくつかの方法が用意されています。モデルはコールバック関数を使用して、いくつかのブロックおよびサブシステムのパラメーターを構成します。詳細については、モデル コールバック (Simulink)を参照してください。コールバック関数 InitFcn は、Modeling>Model Settings>Model Properties>Callbacks にあり、補助関数 cm_ex_adaptive_eq_with_fading_init を呼び出してモデルを初期化します。この補助関数を使用すると、モデルの以下のような設定を変更できます。
SNR などのシステム パラメーター。
ロールオフやフィルター長などのパルス整形フィルター パラメーター。
パス損失値。
チャネル条件: レイリー フェージングまたはライス フェージング、チャネル パス ゲイン、チャネルのパス遅延、ドップラー シフト。
Equalizer Selector サブシステムで使用されるイコライザーの選択と構成。
モデルに関する考慮事項
以下の標準ベースでない通信リンクは、最新の通信システムを表しています。
最適なイコライザーの構成は、チャネル条件によって異なります。初期化補助関数は、異なるイコライザーの機能を強調するドップラー シフトおよびマルチパス フェージング チャネル パラメーターを設定します。
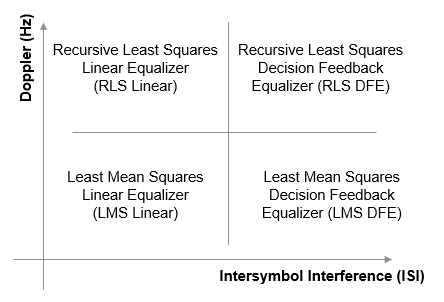
判定フィードバック イコライザー構造は、大きな符号間干渉に対して線形イコライザー構造よりも優れたパフォーマンスを発揮します。
RLS アルゴリズムは、高いドップラー周波数に対して LMS アルゴリズムよりも優れたパフォーマンスを発揮します。
LMS アルゴリズムの実行は高速ですが、収束が遅く、その複雑度は重みの数と共に線形に増大します。
RLS アルゴリズムは迅速に収束し、その複雑度は重みの数の約 2 乗で増大します。これは重みの数が大きい場合、不安定になることがあります。
異なるイコライザーに用いられるチャネルには、以下の特性があります。
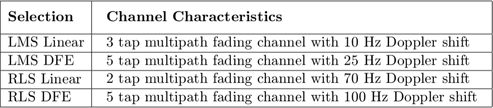
その他のチャネル障害に対する初期設定は、すべてのイコライザーに対して同じです。搬送波周波数オフセット値は、50 Hz に設定されます。自由空間パス損失は、60 dB に設定されます。可変整数遅延は 2 サンプルに設定されます。これは、イコライザーによってタイミング再生が必要になります。
深いチャネル フェージングとパス損失により、イコライザーの入力信号レベルが目的の出力信号レベルよりもかなり小さくなる可能性があり、その結果イコライザーの収束時間が許容できない範囲で長くなる可能性があります。AGC ブロックは、受信信号の振幅を調整して、イコライザーの収束時間を短縮します。選択された変調スキームに基づいて、最適なゲイン出力電力レベルを調整しなければなりません。16QAM の場合、望ましい出力電力である 10 W が使用されます。
イコライザーの学習はシミュレーションの開始時に実行されます。
シミュレーションの実行
シミュレーションを実行すると、シンボル エラー統計が計算され、以下の図が生成されます。
受信フィルターの後の信号のコンスタレーション ダイアグラム。
ゲイン調整後の信号のコンスタレーション ダイアグラム。
イコライズ後の信号のコンスタレーション ダイアグラム (信号品質測定値を表示)。
イコライザーの誤差のプロット。
ここに示されているプロットの場合、選択されたイコライザー アルゴリズムは RLS Linear です。これらの数値を監視することで、受信信号品質がシミュレーション時間が進むにしたがって変化することが確認できます。
After Rx Filter と After AGC のコンスタレーション プロットは、イコライズ前の信号を示します。After AGC は、送信された信号に対するチャネル条件の影響を示します。After Eq プロットは、イコライズ後の信号を示します。イコライズの後にコンスタレーション ダイアグラムでプロットされる信号は、イコライズ処理の効果に基づいて信号品質の変動を示します。シミュレーション全体を通して、イコライズ前にプロットされた信号コンスタレーションは、16QAM 信号コンスタレーションから顕著に逸脱します。After Eq コンスタレーションでは、イコライザーの誤差信号が変化するにつれて、改善または劣化が見られます。Eq Error プロットにプロットされている Eq error は、シミュレーション開始時のイコライズが適切でないことを示しています。まず誤差が小さくなり、次にイコライザーが収束するにつれて改善が見られます。




その他の調査
Equalizer Selector サブシステムをダブルクリックして、異なるイコライザーを選択します。シミュレーションを実行して、さまざまなイコライザー オプションのパフォーマンスを確認します。信号ロガーを使用して、この実験の結果を比較できます。モデル ウィンドウで信号線を右クリックし、[Log Selected Signals] を選択します。信号のログを有効にした場合は、シミュレーションの実行の終了後、シミュレーション データ インスペクターを開いてログ記録された信号を確認します。
MATLAB® コマンド プロンプトで、edit cm_ex_adaptive_eq_with_fading_init.m を入力して初期化ファイルを開き、パラメーターを変更してシミュレーションを再実行します。たとえば、チャネル特性 (params.maxDoppler、params.pathDelays、および params.pathGains) を調整します。RLS 適応アルゴリズムは、最大ドップラーが増加するにつれて、LMS 適応アルゴリズムよりも優れたパフォーマンスを発揮します。