Linear Equalizer
線形フィルターを使用した変調信号のイコライズ
ライブラリ:
Communications Toolbox /
Equalizers
説明
Linear Equalizer ブロックは、タップ付き遅延線フィルターを使って、分散チャネルを通る線形変調信号をイコライズします。有限入力応答 (FIR) フィルターとしてモデル化されたチャネルの推定を使用して、このブロックは入力フレームを処理し、推定信号を出力します。
このアイコンは、LMS または RLS 適応アルゴリズムを使用する構成に対してすべての端子が有効になっているブロックを示しています。
![]()
このアイコンは、CMA 適応アルゴリズムを使用する構成に対してすべての端子が有効になっているブロックを示しています。
![]()
例
最小平均二乗 (LMS) アルゴリズムを使用した線形イコライズを適用して、AWGN チャネル経由で渡した QPSK シンボルを復元します。
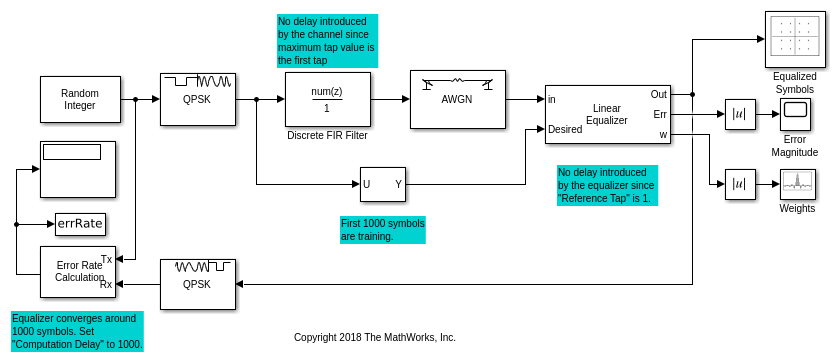
slex_lineq_qpsk_signal モデルは Random Integer Generator ブロックを使用して M=4 シーケンスを生成します。シーケンスは、M-PSK Modulator Baseband ブロックで変調され、Discrete FIR Filter ブロックでフィルター処理されて、AWGN ブロックで劣化します。Linear Equalizer ブロックはデータ シーケンスをイコライズし、データは M-PSK Demodulator Baseband ブロックで復調されて、ビット エラー レートが計算されます。変調器からの信号パスは、Selector ブロックに分割されます。これにより、変調信号の最初の 1000 シンボルが初期トレーニング シーケンスとしてイコライザーに提供されます。
最大タップ値が Discrete FIR Filter の最初のタップであり、イコライザー リファレンス タップが 1 であるため、送信信号と受信信号間での遅延は発生しません。イコライザーは 1000 シンボルあたりから収束します。そのため、この値は Error Rate Calculation ブロックの計算遅延に使用されます。
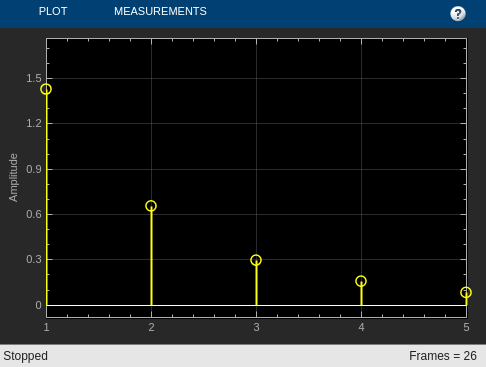
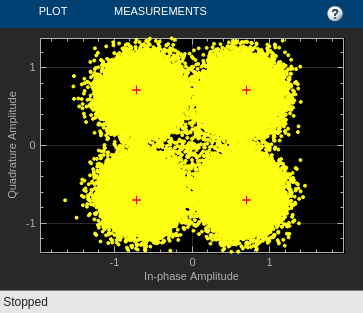
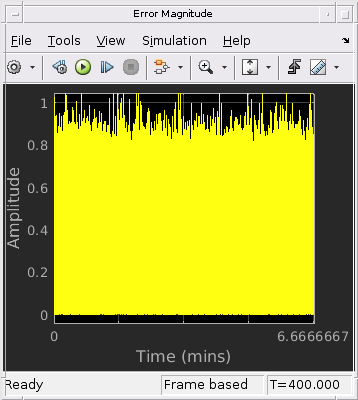
計算されたエラー レートが表示され、プロットにはイコライズされたコンスタレーション、イコライズされたタップ重み、および信号エラーの大きさが表示されます。
Computed error rate = 0.0021111
拡張例

フィルター処理とフェージング チャネルによる適応イコライズ
このモデルでは、フェージング チャネルのある通信リンクでの、選択された適応イコライザーの動作を示します。送信側と受信側は、ルート レイズド コサインのパルス整形フィルター処理を行います。subsystem ブロックにより、最小平均二乗 (LMS) または再帰的最小二乗 (RLS) 適応アルゴリズムを使用する、線形イコライザーまたは判定フィードバック イコライザーを選択できます。
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
多次元信号 |
|
可変サイズの信号 |
|
詳細
アルゴリズム
線形イコライザーは、チャネルの周波数応答に null が存在しない場合、符号間干渉 (ISI) を削除できます。チャネルの周波数応答に null が存在する場合、線形イコライザーはノイズを強調する傾向があります。この場合は、ノイズが強調されないように判定フィードバック イコライザーを使用します。
線形イコライザーは、入力信号からのサンプルを格納するタップ付き遅延線で構成されます。シンボル周期ごとに一度、イコライザーは遅延ラインで値の重み付き総和を出力し、次のシンボル周期のための準備として重みを更新します。
線形イコライザーはシンボル間隔または分数シンボル間隔にすることができます。
シンボル間隔イコライザーの場合、シンボルあたりのサンプル数 K は 1 です。出力サンプル レートは入力サンプル レートと等しくなります。
分数シンボル間隔イコライザーの場合、シンボルあたりのサンプル数 K は 1 より大きい整数です。通常、分数間隔イコライザーの K は 4 です。出力サンプルレートは 1/T、入力サンプルレートは K/T になります。ここで、T はシンボル周期です。タップ重みの更新は、出力レートで起こります。
この図は、重みが L、シンボル周期が T、シンボルあたりのサンプル数が K の線形イコライザーを示しています。K が 1 の場合、結果は分数シンボル間隔線形イコライザーではなくシンボル間隔線形イコライザーです。
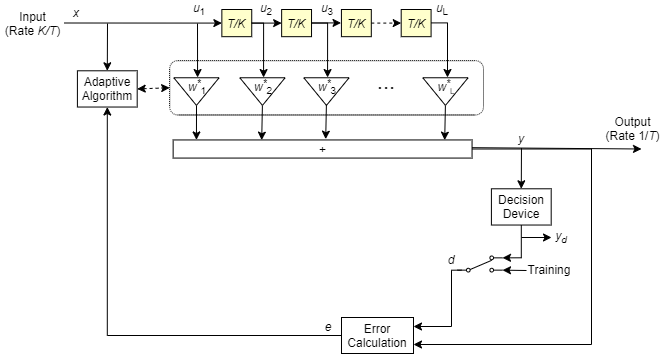
シンボル周期ごとに、イコライザーはタップ付き遅延線で K 個の入力サンプルを受信します。イコライザーはその後、遅延線で値の重み付き総和を出力し、次のシンボル周期のための準備として重みを更新します。
詳細については、イコライズを参照してください。
拡張機能
バージョン履歴
R2019a で導入