車両システム
以下の例を使用して、自動車システム、船舶システム、航空宇宙システム用の機械と制御を実装する方法を学習します。
注目の例
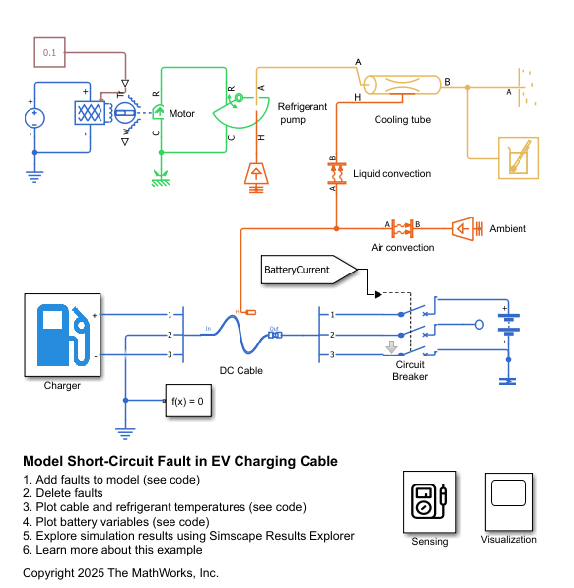
Model Short-Circuit Fault in EV Charging Cable
Model and prevent a short-circuit fault in the connectors of an electric vehicle (EV) charging cable. First, you examine the system under normal operating conditions with effective refrigerant cooling and a constant-current (CC), constant-voltage (CV) charging strategy. Then, you introduce an open-circuit fault in the motor of the refrigeration system. This fault causes the cable to overheat, resulting in the short-circuit fault in the cable connectors. Finally, you regulate the current to enable passive cooling and safer battery charging without relying only on the refrigeration system.

DQ 座標系での車軸駆動 EV 内 IPMSM のトルクの制御
この例では、単純化された車軸駆動電気自動車を推進する埋込永久磁石同期機 (IPMSM) をモデル化します。この例では、回転子の主磁束方向と直交方向 (DQ) の基準座標系でトルクを制御してシミュレーションします。IPMSM は、モーター モードと発電機モードの両方で動作します。車両のトランスミッションと差動装置は、ギア減速比の固定されたモデルによって実装されています。Vehicle Controller サブシステムは、運転者の入力を、関連するトルク指令に変換します。Drive Controller サブシステムは IPMSM のトルクを制御します。制御アルゴリズムは連続時間で実装されています。このモデルをより高速にシミュレーションするために、この例では可変ステップ ソルバーを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

Control Torque of IPMSM Inside Parallel HEV in DQ Frame
Models a simplified parallel hybrid electric vehicle (HEV). An interior permanent magnet synchronous machine (IPMSM) and an internal combustion engine (ICE) provide the vehicle propulsion. This example controls and simulates the torque in the rotor direct-quadrature (DQ) reference frame. The IPMSM operates in both motoring and generating modes. A fixed-ratio gear-reduction model implements the vehicle transmission and differential. The Vehicle Controller subsystem converts the driver inputs into torque commands. A Stateflow® chart implements the vehicle control strategy. The ICE Controller subsystem controls the torque of the combustion engine. The EM Controller subsystem controls the torque of the IPMSM. To simulate this model faster, this example uses a variable-step solver. The Scopes subsystem contains scopes that allow you to see the simulation results.

バッテリーを充電する自動車の交流機
この例では、交流機の動作を、効率的なシミュレーションが可能な DC モデルに抽象化する方法を示します。このテスト ハーネスは、最初に交流機の速度をゼロから標準的なアイドリング速度である 900 RPM まで上昇させます。生成された電圧が、整流ダイオードに関連付けられた順電圧降下を上回るのに十分である場合に、充電電流が上昇し始めます。次に、テスト ハーネスは速度を 5000 RPM まで上昇させます。すると、交流機は安定化電圧を維持するために、界磁電圧を下げなければなりません。交流機の温度上昇に伴う固定子の抵抗値の増大をモデルが捉えるため、デバイスのパフォーマンスが低下します。
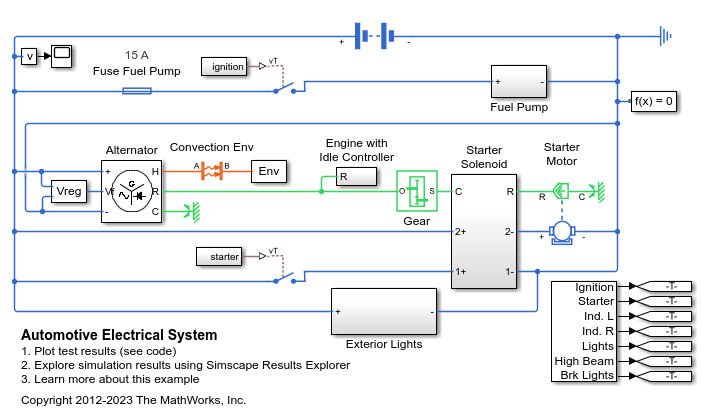
自動車の電気システム
この例では、自動車の電気システムの、単純化された動的モデルを説明します。モデルには電気システム、機械システム、熱システムが含まれ、電気回路網に対するエンジン始動の効果のシミュレーションを実行することができます。

電気自動車用 DC 高速充電器
この例では、電気自動車 (EV) のバッテリー パックに接続される DC 高速充電ステーションをモデル化します。
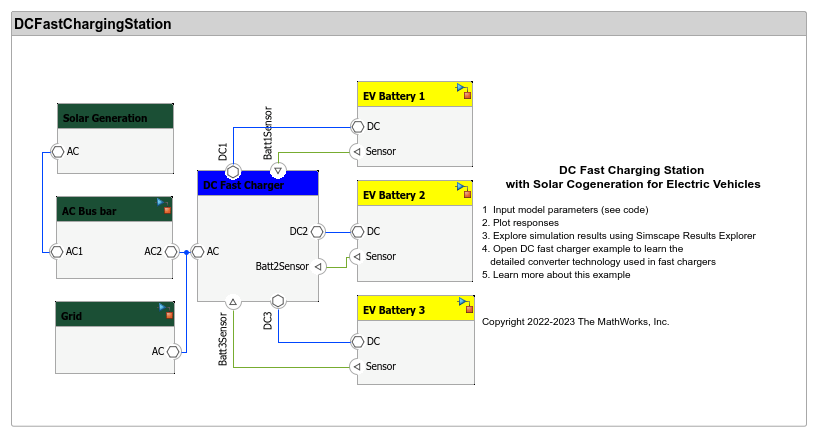
ソーラー コジェネレーションを備えた電気自動車用 DC 高速充電ステーション
この例では、電気自動車 (EV) の 3 つのバッテリー パックに接続されるソーラー コジェネレーションを備えた DC 高速充電ステーションをモデル化します。
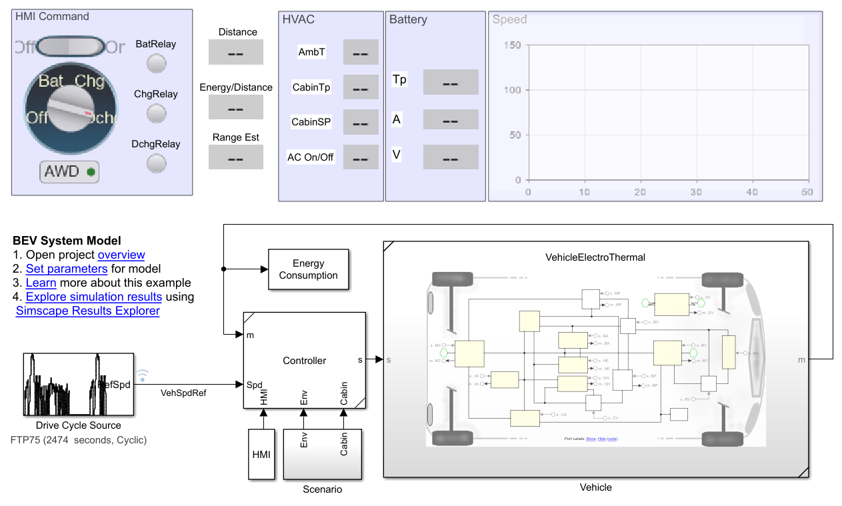
Detailed Battery Electric Vehicle (BEV) Model
Design a battery electric vehicle (BEV) using high-fidelity models of vehicle components. You can use this model to perform detailed analysis at the component level. You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.

電気エンジン動力計
この例では、電気自動車の動力計テストをモデル化する方法を説明します。テスト環境には、機械シャフトを介して背面合わせに連結された非同期機 (ASM) と埋込永久磁石同期機 (IPMSM) が含まれています。高圧バッテリーから、制御された三相コンバーターを通して両方のマシンに電力が供給されます。164 kW ASM が負荷トルクを生成します。35 kW IPMSM がテスト対象の電気機です。Control Machine Under Test (IPMSM) サブシステムは、IPMSM のトルクを制御します。コントローラーにはマルチレートの PI ベース制御構造が含まれています。開ループのトルク制御のレートは、閉ループの電流制御のレートより遅くなっています。コントローラーのタスク スケジューリングは、Stateflow® ステート マシンとして実装されます。Control Load Machine (ASM) サブシステムは、シングル レートを使用して ASM の速度を制御します。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

電動パワー ステアリング
この例では、永久磁石同期電動機 (PMSM) を使用して、自動車のパワー ステアリング システムでドライバーがかけた力を増幅する方法を説明します。

HIL 用に構成された電気自動車
ハードウェアインザループ (HIL) の展開に適した電気自動車をモデル化します。

48 V 始動発電機のエネルギー バランス
この例では、単純化された 48 V の車載システムにおいて始動機/発電機として使用される埋込永久磁石同期機 (IPMSM) を説明します。このシステムには、48 V の電気回路網と 12 V の電気回路網が含まれています。内燃エンジン (ICE) は、基本的な機械ブロックで表されます。IPMSM は、ICE がアイドリング速度に達するまでモーターとして動作し、その後は発電機として動作します。IPMSM は、R3 の電力消費源を含む 48 V 回路網に電力を供給します。48 V 回路網は次の 2 つの消費源を含む 12 V 回路網に電力を供給します。R1 および R2。合計シミュレーション時間 (t) は 0.5 秒です。t = 0.05 秒で ICE が始動します。t = 0.1 秒で R3 がオンになります。t = 0.3 秒で R2 がオンになり、12 V 電気回路網の負荷が増加します。EM Controller サブシステムには、外側の電圧制御ループと内側の 2 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。Control サブシステムのタスク スケジューリングは、Stateflow® のステート マシンとして実装されます。DCDC Controller サブシステムは、12 V 回路網に電力を供給する DC-DC 降圧コンバーター用の単純な PI コントローラーを実装します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

ハイブリッド電気自動車 (HEV) モデル
この例では、速度追従のシミュレーション用に、簡単なルールベースのコントローラーを備えたパワースプリット ハイブリッド電気自動車 (HEV) をモデル化する方法を説明します。このモデルは MATLAB® でダウンロードするか、MATLAB Central File Exchange と GitHub® からアクセスできます。

IPMSG の電圧安定化
この例では、埋込永久磁石同期発電機 (IPMSG) をベースとしたハイブリッド電気自動車 (HEV) 用低電圧発電機システムを制御する方法を説明します。Control サブシステムには、外側の電圧制御ループと内側の 2 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。Control サブシステムのタスク スケジューリングは、Stateflow® のステート マシンとして実装されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。内燃エンジンを表す理想的な角速度源が IPMSG を駆動します。IPMSG は、負荷 R1 および R2 に低電圧電力を供給します。t = 0.4 秒で、スイッチが閉じ、負荷が増加します。

直列 HEV における IPMSM トルク制御
この例では、単純化された直列ハイブリッド電気自動車 (HEV) を推進する埋込永久磁石同期機 (IPMSM) を説明します。高電圧バッテリーに接続された理想的な DCDC コンバーターは、制御された三相コンバーターを通して IPMSM に電力を供給します。内燃エンジン駆動の発電機により高電圧バッテリーが充電されます。車両のトランスミッションと差動装置は、ギア減速比の固定されたモデルを使用して実装されています。Vehicle Controller サブシステムは、運転者の入力を、IPMSM と発電機用の関連指令値に変換します。Drive Controller サブシステムは IPMSM のトルクを制御します。コントローラーにはマルチレートの PI ベース制御構造が含まれています。開ループのトルク制御のレートは、閉ループの電流制御のレートより遅くなっています。コントローラーのタスク スケジューリングは、Stateflow® ステート マシンとして実装されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

直並列 HEV における IPMSM トルク制御
この例では、単純化された直並列ハイブリッド電気自動車 (HEV) を説明します。埋込永久磁石同期機 (IPMSM) と内燃エンジン (ICE) が車両に推進力を与えます。ICE はまた運転中に、発電機を使用して高電圧バッテリーの再充電も行います。車両のトランスミッションと差動装置は、ギア減速比の固定されたモデルを使用して実装されています。Vehicle Controller サブシステムは、運転者の入力をトルク指令に変換します。車両制御の手法は、Stateflow® のステート マシンとして実装されます。ICE Controller サブシステムは内燃エンジンのトルクを制御します。Generator Controller サブシステムは発電機のトルクを制御します。Drive Controller サブシステムは IPMSM のトルクを制御します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

車軸駆動 EV における IPMSM トルク制御
この例では、単純化された車軸駆動電気自動車を推進する埋込永久磁石同期機 (IPMSM) を説明します。高圧バッテリーは、制御された三相コンバーターを通して IPMSM に電力を供給します。IPMSM は、モーター モードと発電機モードの両方で動作します。車両のトランスミッションと差動装置は、ギア減速比の固定されたモデルを使用して実装されています。Vehicle Controller サブシステムは、運転者の入力を、関連するトルク指令に変換します。Drive Controller サブシステムは IPMSM のトルクを制御します。コントローラーにはマルチレートの PI ベース制御構造が含まれています。開ループのトルク制御のレートは、閉ループの電流制御のレートより遅くなっています。コントローラーのタスク スケジューリングは、Stateflow® ステート マシンとして実装されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

並列 HEV における IPMSM トルク制御
この例では、単純化された並列ハイブリッド電気自動車 (HEV) を説明します。埋込永久磁石同期機 (IPMSM) と内燃エンジン (ICE) が車両に推進力を与えます。IPMSM は、モーター モードと発電機モードの両方で動作します。車両のトランスミッションと差動装置は、ギア減速比の固定されたモデルを使用して実装されています。Vehicle Controller サブシステムは、運転者の入力をトルク指令に変換します。車両制御の手法は、Stateflow® のステート マシンとして実装されます。ICE Controller サブシステムは内燃エンジンのトルクを制御します。Drive Controller サブシステムは IPMSM のトルクを制御します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

船舶用フル電動推進力システム
この例では、典型的な船舶の 2 次元断面上の電力システムを説明します。このシステムは、ベース負荷、宿泊設備負荷、船首推進機、電気推進機を備えています。

火星のヘリコプターのシステムレベル設計
この例では、Simscape™ Electrical™ を使用して、火星での飛行に適した同軸回転子をもつヘリコプターをモデル化する方法を説明します。このヘリコプターは NASA が開発したロボット ヘリコプター Ingenuity をヒントにしています。これは、別の惑星での最初の動力飛行を実現しました。
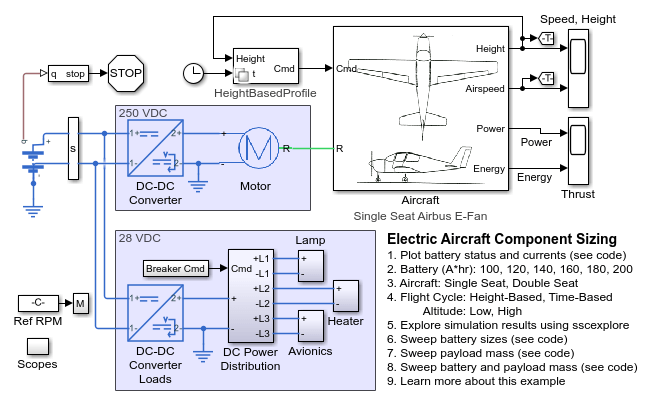
Model Electric and Hybrid Electric Aircraft
Evaluate architectures of electric and hybrid electric aircraft against design criteria like flight range and maximum flight time. You can modify many aspects of the design, including the battery size and payload. Electric aircraft is an active area of development in the aerospace industry. You can then select the power network architectures and size the components, based on the results of your analysis. You can also reduce the number of design iterations you need to meet system-level design requirements, by using parameter sweeps.
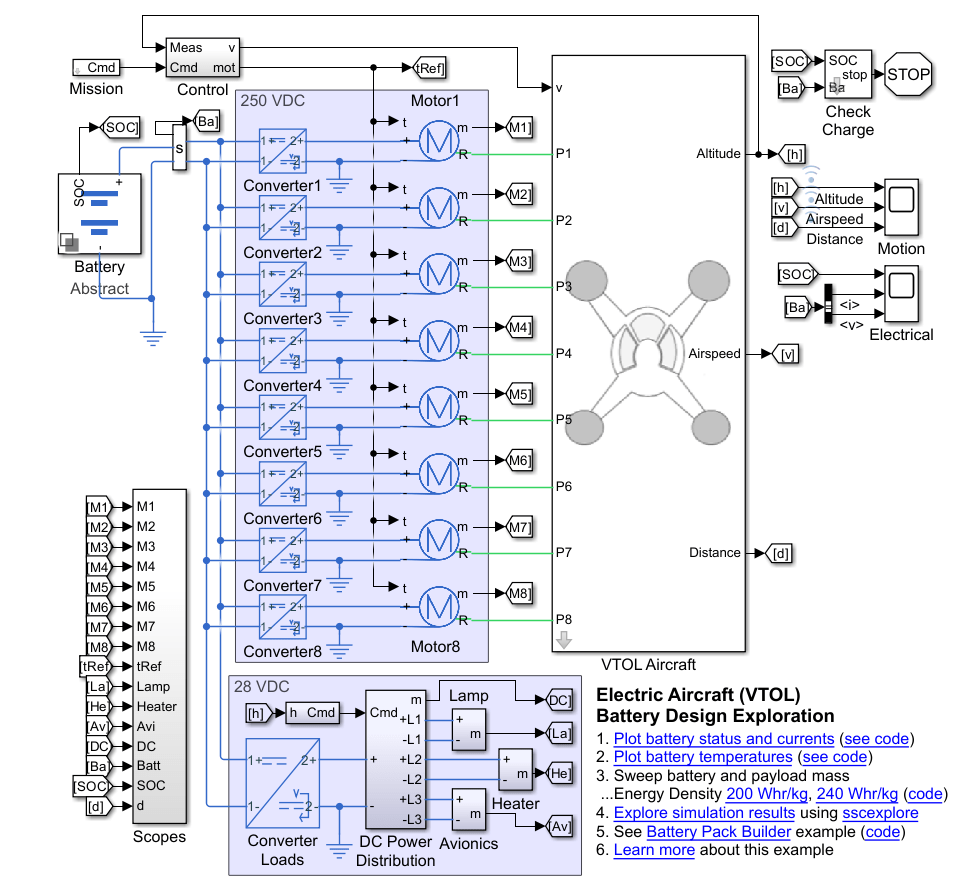
Model Electric VTOL Aircraft Battery Pack
Model an electric vertical takeoff and landing (VTOL) aircraft and design the battery pack. You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.
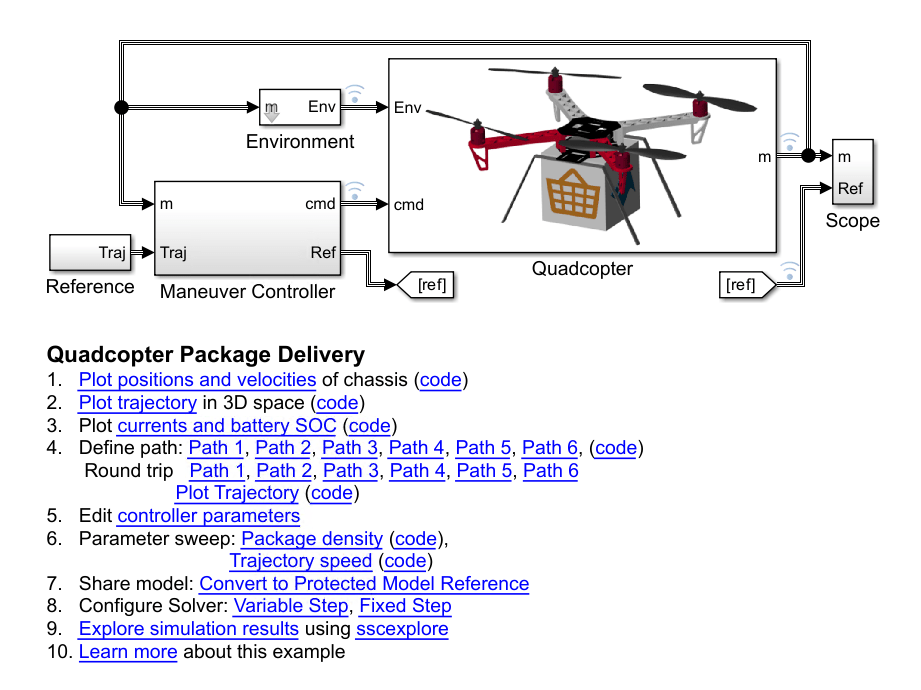
クワッドコプター ドローンのモデル化
この例では、荷物を配送するための経路をナビゲートするクワッドコプターをモデル化する方法を説明します。このモデルは MATLAB® でダウンロードするか、MATLAB Central File Exchange と GitHub® からアクセスできます。

On-Board Charger for Two-Wheeler Electric Vehicle
Model an on-board charger for a two-wheeler vehicle by using an AC-DC converter and a DC-DC converter to achieve unity power factor (UPF) operation and constant current (CC) battery charging.

パワースプリット ハイブリッド車両の電気回路網
この例では、パワースプリット ハイブリッド トランスミッションの基本アーキテクチャを説明します。遊星歯車が、モーターおよび発電機と共に、不等速比歯車として動作します。このテストでは、車両が 15 m/s から 20 m/s に加速し、その後減速して 15 m/s に戻ります。電力管理戦略によって、電力のみを使用して運転が実行されます。
システムレベルのバッテリー式電気自動車 (BEV) モデル
この例では、車両コンポーネントの抽象モデルを使用してバッテリー式電気自動車を設計する方法を示します。これは、電気効率などの車両レベルのパラメーターの推定に使用できる単純な高速実行モデルです。このモデルは MATLAB® でダウンロードするか、MATLAB Central File Exchange と GitHub® からアクセスできます。