ロボティクスおよびメカトロニクス
以下の例を使用して、モーターの制御、モーターの特性の比較、電動アクチュエータの開発の方法について学習します。
注目の例

ブラシレス DC モーター
この例では、ブラシレス DC モーター (サーボモーター) のシステムレベル モデルをデータシート情報に基づいて作成し、パラメーター化する方法を説明します。モーターとドライバーは、単一のマスク サブシステムとしてモデル化されています。Simulink® でモデルを表示する場合、Motor and driver ブロックを選択して Ctrl + U と入力すると、マスクの下を見てモデルの構造を確認できます。

複巻モーターの設計の最適化
この例では、目的の曲線に一致するように複巻モーターのトルク-回転数曲線を最適化する設計パラメーターを求める方法を説明します。
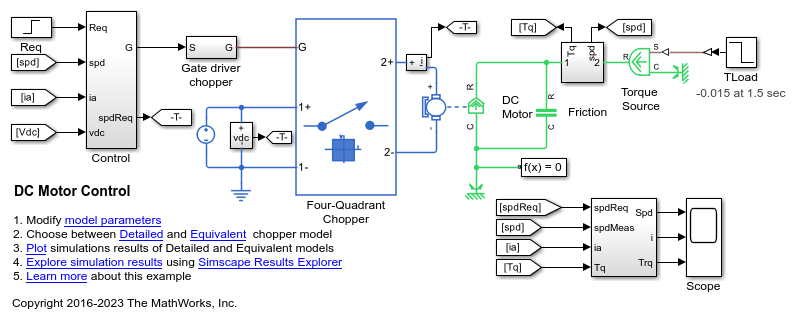
DC モーター制御
この例では、DC モーターのカスケード速度制御構造を説明します。DC モーターに電力を供給するために、PWM 制御の 4 象限チョッパーが使用されます。Control サブシステムには、外側の速度制御ループ、内側の電流制御ループ、および PWM 生成が含まれています。合計シミュレーション時間 (t) は 4 秒です。t = 1.5 秒で負荷トルクが増加します。t = 2.5 秒で基準速度が 1000 rpm から 2000 rpm に変化します。

DC モーター制御 (リードラグ)
この例では、DC モーターのリードラグ速度制御構造を説明します。DC モーターに電力を供給するために、PWM 制御の 4 象限チョッパーが使用されます。Control サブシステムにはリードラグ コントローラー、定数ゲイン、および PWM 生成が含まれています。合計シミュレーション時間 (t) は 4 秒です。t = 1.5 秒で負荷トルクが増加します。t = 2.5 秒で基準速度が 1000 rpm から 2000 rpm に変化します。
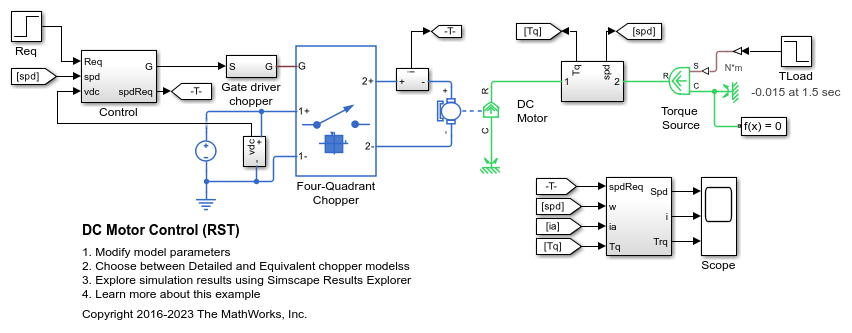
DC モーター制御 (RST)
この例では、DC モーターの RST 速度制御構造を説明します。DC モーターに電力を供給するために、PWM 制御の 4 象限チョッパーが使用されます。Control サブシステムには、制御区間 30 の RST コントローラーと PWM 生成が含まれています。センサーは、回転子の速度を 5 ms の遅延で測定します。合計シミュレーション時間 (t) は 4 秒です。t = 1.5 秒で負荷トルクが増加します。t = 2.5 秒で基準速度が 1000 rpm から 2000 rpm に変化します。

DC モーター制御 (スミス予測器)
この例では、DC モーターのスミス予測器速度制御構造を説明します。DC モーターに電力を供給するために、PWM 制御の 4 象限チョッパーが使用されます。Control サブシステムには、スミス予測器コントローラーと PWM 生成が含まれています。センサーは、回転子の速度を 5 ms の遅延で測定します。合計シミュレーション時間 (t) は 4 秒です。t = 1.5 秒で負荷トルクが増加します。t = 2.5 秒で基準速度が 1000 rpm から 2000 rpm に変化します。

DC モーター制御 (状態フィードバックおよびオブザーバー)
この例では、DC モーターの状態フィードバック速度制御構造を説明します。DC モーターに電力を供給するために、PWM 制御の 4 象限チョッパーが使用されます。Control サブシステムには、状態フィードバック制御ループと PWM 生成が含まれます。状態ベクトルには、測定される回転子速度と、オブザーバーを使用して推定される DC モーター電流が含まれます。オブザーバーと状態フィードバック コントローラーはどちらも、システムの状態空間モデルを使用して、極配置によって合成されます。合計シミュレーション時間 (t) は 4 秒です。t = 1.5 秒で負荷トルクが増加します。t = 2.5 秒で基準速度が 1000 rpm から 2000 rpm に変化します。

ハイブリッド線形アクチュエータ
この例では、DC モーターと、親ねじと直列に接続された圧電スタックで構成されるハイブリッド アクチュエータを示します。DC モーターと親ねじの組み合わせは大規模な変位 (数十ミリメートル) に対応しますが、基準要求 x_ref を追跡するときには動的に遅くなります。一方、圧電スタックは最大±0.1 mm の変位にしか対応しませんが、動的応答が非常に高速です。2 つのアクチュエータ テクノロジーを組み合わせることで、位置決めがきわめて正確で、ストロークの大きなアクチュエータが作成されます。

Motor-CAD からの効率マップ データのインポート
この例では、Motor-CAD から効率マップ データをインポートして、Simscape™ Electrical™ の Motor & Drive (System Level) ブロックをパラメーター化する方法を説明します。これにより、損失に関する正確な予測を行いながら、モーター ドライブのシステムレベル シミュレーションを高速で行うことができます。

リニア電動アクチュエータ (モーター モデル)
このモデルは、データシートのパラメーター値を使用して、制御されていない線形アクチュエータのモデルを開発する方法を示します。アクチュエータを構成する DC モーターが 6.25:1 ウォーム ギアを駆動し、それが 3 mm の親ねじを駆動して線形運動を生成します。アクチュエータに関するメーカーのデータでは、無負荷の線形速度 (26 mm/s)、定格負荷 (1000 N)、定格負荷の線形速度 (19 mm/s)、最大電流 (5 A) が定義されています。最大静的力は 4000 N で、定格電圧は 24 V DC です。
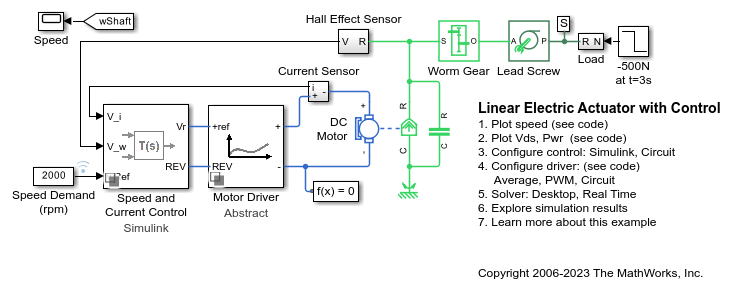
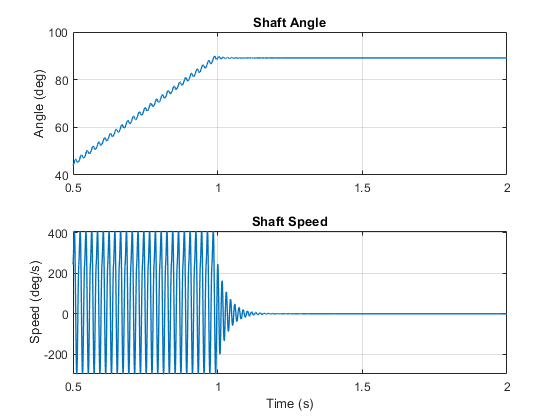
制御付き線形電動アクチュエータ
この例では、制御された線形アクチュエータの詳細な実装モデルを示します。アクチュエータを構成する DC モーターがウォーム ギアを駆動し、それが親ねじを駆動して線形運動を生成します。モデルには、ホール効果センサーの量子化効果と、アナログ エレクトロニクスにおける制御の実装が含まれています。このモデルには、さまざまな忠実度レベルのモデルをもつ複数のバリアント サブシステムがあります。

Model a Motor Drive with Multiple Intermittent Torque Limits
Model a motor drive with multiple intermittent over-torque limits by using Simscape™ Electrical™.

モーターのトルク-速度曲線
この例では、5 つの異なるモーター タイプのトルク-速度特性の比較を示します。モーター タイプを選択するには、Electric Motor ブロックを右クリックし、コンテキスト メニューから [ブロック パラメーター (Subsystem)] を選択します。新しいウィンドウで、[ラベル モードのアクティブな選択肢] パラメーターを使用して目的のモーターを指定します。すべてのモーターは、ほぼ同じ定格機械動力に調整されています。

PWM 電圧源と H-Bridge ドライバーを使用した DC モーターの制御
この例では、Controlled PWM Voltage ブロックと H-Bridge ブロックを使用して DC モーターを制御する方法を示します。DC Motor ブロックは、DC 電源電圧が 12 V の場合、2500 rpm で機械動力 10 W を供給し、無負荷速度 4000 rpm で回転します。したがって、PWM 基準電圧を最大値の 5 V に設定した場合、モーターは 4000 rpm で回転します。PWM 基準電圧を 2.5 V に設定した場合、モーターは約 2000 rpm で回転します。高速なシミュレーションを実現するために、この例では、Controlled PWM Voltage ブロックと H-Bridge ブロックの [シミュレーション モード] パラメーターを Averaged に設定します。平均化された動作を検証するには、Controlled PWM Voltage ブロックと H-Bridge ブロックの両方で Simulation mode パラメーターを PWM に設定します。
ステッピング モーターの Averaged モード
このモデルでは、Stepping および Averaged の各シミュレーション モードでシミュレーションを行うステッピング モーターを説明します。Averaged モードの目的は、滑りを発生させない任意の負荷に対する、より高速なシミュレーションです。結果の不正確な解釈を防ぐため、ステッピング モーターにはおおまかな滑り検出機能があり、警告またはエラーを生成するように設定できます。
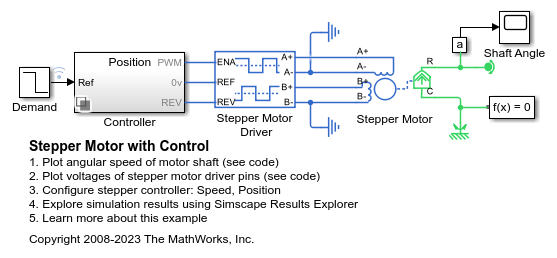
制御付きステッピング モーター
この例では、Stepper Motor ブロックと Stepper Motor Driver ブロックを使用して、制御された永久磁石ステッピング モーターをモデル化する方法を示します。このモデルは 2 つのコントローラー オプションを備えています。1 つは位置、1 つは速度を制御します。コントローラーのタイプを変更するには、Controller サブシステムを右クリックし、[バリアント]、[ラベル モードのアクティブな選択肢] を選択してから、[位置] または [速度] を選択します。ステッピング モーターのフル ステップ サイズは 1.8 度です。位置制御モードでは、[Ref] 端子への入力は目的とするステップ数です。速度制御モードでは、[Ref] 端子への入力は目的とする 1 秒あたりのステップ数です。
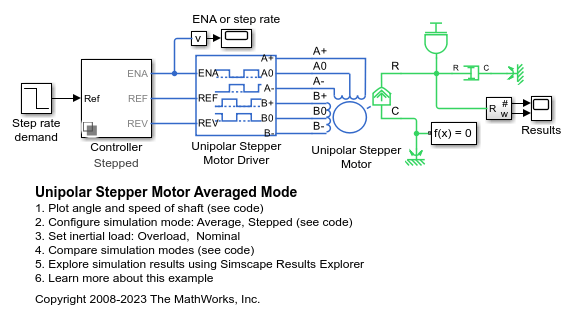
ユニポーラ ステッピング モーターの Averaged モード
このモデルでは、Stepping および Averaged の各シミュレーション モードでシミュレーションを実行するユニポーラ ステッピング モーターを説明します。Averaged モードの目的は、滑りを発生させない任意の負荷に対する、より高速なシミュレーションです。結果の不正確な解釈を防ぐため、ステッピング モーターにはおおまかな滑り検出機能があり、警告またはエラーを生成するように設定できます。
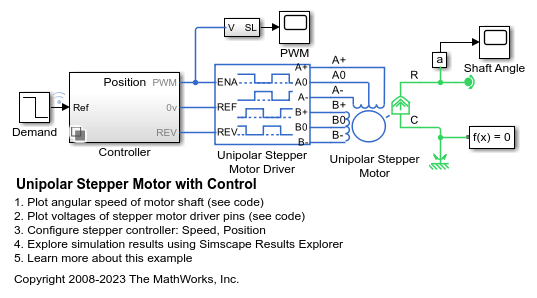
制御付きユニポーラ ステッピング モーター
この例では、Unipolar Stepper Motor ブロックと Unipolar Stepper Motor Driver ブロックを使用して、制御された永久磁石ステッピング モーターをモデル化する方法を示します。このモデルは 2 つのコントローラー オプションを備えています。1 つは位置、1 つは速度を制御します。コントローラーのタイプを変更するには、Controller サブシステムを右クリックし、[バリアント]、[ラベル モードのアクティブな選択肢] を選択してから、[位置] または [速度] を選択します。ステッピング モーターのフル ステップ サイズは 1.8 度です。位置制御モードでは、[Ref] 端子への入力は目的とするステップ数です。速度制御モードでは、[Ref] 端子への入力は目的とする 1 秒あたりのステップ数です。