制御付きユニポーラ ステッピング モーター
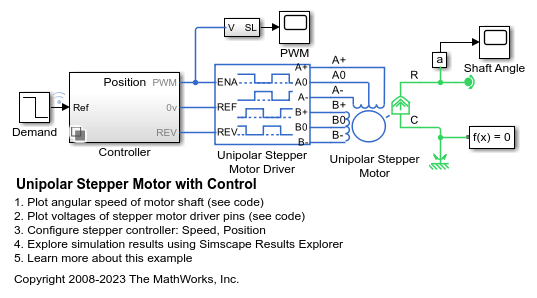
この例では、Unipolar Stepper Motor ブロックと Unipolar Stepper Motor Driver ブロックを使用して、制御された永久磁石ステッピング モーターをモデル化する方法を示します。このモデルは 2 つのコントローラー オプションを備えています。1 つは位置、1 つは速度を制御します。コントローラーのタイプを変更するには、Controller サブシステムを右クリックし、[バリアント]、[ラベル モードのアクティブな選択肢] を選択してから、[位置] または [速度] を選択します。ステッピング モーターのフル ステップ サイズは 1.8 度です。位置制御モードでは、[Ref] 端子への入力は目的とするステップ数です。速度制御モードでは、[Ref] 端子への入力は目的とする 1 秒あたりのステップ数です。
このモデルは、システムレベルでステッピング モーターのダイナミクスについて学び、与えられた負荷を駆動した場合にステップ角度が滑るかどうかを判断するのに適したモデルです。このモデルを使用して、ステッピング コントローラーを調整してステッピングのパフォーマンスを向上させることができます。また、このコントローラーの一部または全部を市販のステッピング モーター コントローラー モジュールに実装できます。PIC (Peripheral Interface Controller) などのマイクロプロセッサにアルゴリズムを実装すると、柔軟性が高まり、マイクロプロセッサを使用してシステムの他の部分を制御することもできます。Unipolar Stepper Motor Driver ブロックの一部をマイクロプロセッサに実装し、電力増幅器のステージのみをアナログ エレクトロニクスに残すことができます。
モデルを開く
位置制御テストのシミュレーション結果の表示
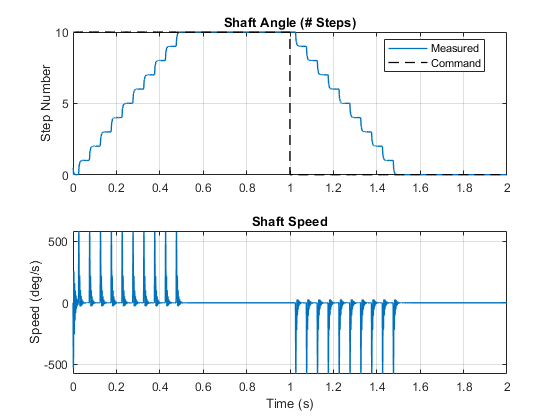
次のプロットでは、位置コントローラーを使用した場合におけるモーター シャフトの角度と要求信号を比較しています。位置制御アルゴリズムは、位置コマンドをステップ数として受け入れ、そのコマンドをステッピング モーターのドライバーを制御するパルス列に変換します。シャフトがコマンドで指定された位置に落ち着く際に、角速度のプロットにスパイクが発生します。
速度制御テストのシミュレーション結果の表示
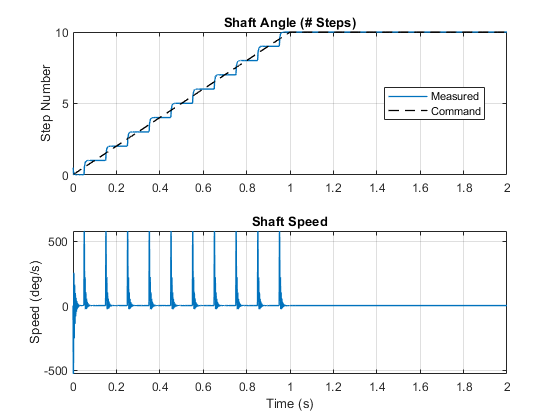
次のプロットでは、速度コントローラーを使用した場合におけるモーター シャフトの角度と要求信号を比較しています。速度制御アルゴリズムは、速度コマンドを 1 秒あたりのステップ数として受け入れ、そのコマンドをステッピング モーターのドライバーを制御するパルス列に変換します。シャフトが現在のステップに落ち着く際に、角速度のプロットにスパイクが発生します。
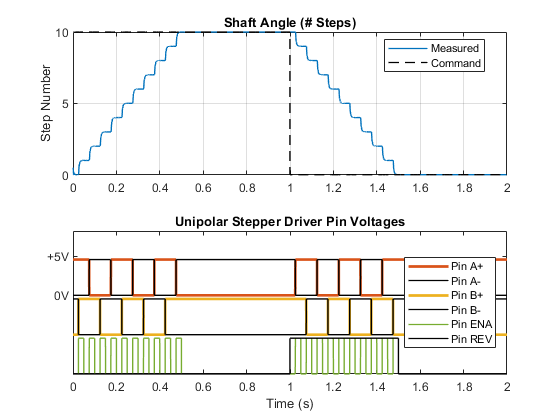
次のプロットは、ステッピング モーターのドライバーにあるピンの状態が、ステッピング モーターの運動に与える影響を示しています。イネーブル (ENA) 信号が Unipolar Stepper Motor Driver ブロックの [有効化しきい値電圧] パラメーターの値を上回るたびに、ドライバーによってステップが開始されます。ドライバーは、共通接続 A0 と B0 を常に High に設定し、必要に応じて A+、A-、B+、B- を接地します。
参考
Unipolar Stepper Motor | Unipolar Stepper Motor Driver