船舶用フル電動推進力システム
この例では、典型的な船舶の 2 次元断面上の電力システムを説明します。このシステムは、ベース負荷、宿泊設備負荷、船首推進機、電気推進機を備えています。
このシステムには以下の主要コンポーネントがあります。
30 MVA ガス タービン、円筒形回転子をもつ交流機
5 MVA ディーゼル発電機、突極交流機
11.5 MVA ベース負荷
6 MVA スイッチ付き宿泊設備負荷
20 MVA 平均値推進用整流器
1 MVA 直接オンライン始動、かご形船首推進機
このシミュレーション中のイベントの流れは以下のとおりです。
10 秒 - 宿泊設備負荷切断
20 秒 - 推進力の上昇開始
30 秒 - フル パワーで前進
40 秒 - 推進力の低下開始
50 秒 - 船首推進機の始動
60 秒 - 宿泊設備負荷接続
モデル

Simscape ログからのシミュレーション結果
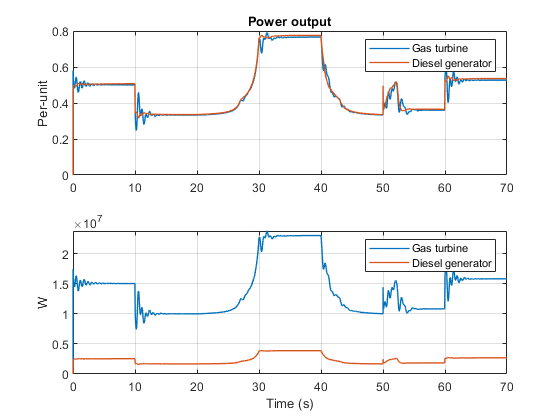
以下のプロットは、ディーゼル発電機とガス タービンの電力出力を示しています。
リアルタイム シミュレーションの結果
この例は、以下のプラットフォームでテストされました。
Intel® 3.5 GHz i7 マルチコア CPU と 4 GB の RAM を搭載した Speedgoat™ Performance リアルタイム ターゲット マシン。
3.5 GHz の Intel® Core XEON E3-1275v3 と 4 GB の RAM を搭載した dSPACE® SCALEXIO LabBox。
Simscape のローカル ソルバーを使用することで、このモデルを 400 マイクロ秒のステップ サイズでリアルタイム実行できます。サンプル レートが小さい場合、コールド キャッシュが原因で、最初のタスク実行中にタスク オーバーランが発生する可能性があります。このオーバーランを回避するには、選択したプラットフォームがこれらのオプションをサポートしている場合、タスク オーバーランの数を制限するか、リアルタイム アプリケーションの起動フェーズにおいてタスクのオーバーラン許容回数を制限するか、周期タスクのサンプル時間を延長することで、起動時の動作を緩和できます。
参考
Synchronous Machine Round Rotor | Synchronous Machine Salient Pole | Wye-Connected Load | Average-Value Rectifier (Three-Phase) | Induction Machine Squirrel Cage | Phase Permute | Circuit Breaker (Three Phase) | Transmission Line (Three-Phase) | SM AC1C