クワッドコプター ドローンのモデル化
この例では、荷物を配送するための経路をナビゲートするクワッドコプターをモデル化する方法を説明します。このモデルは MATLAB® でダウンロードするか、MATLAB Central File Exchange と GitHub® からアクセスできます。
例の概要
この例では、次の方法を学習します。
電流とドローン範囲を推定。
シャーシとプロペラの CAD ファイルを使用して機械システムをモデル化。
カスケード比例-積分-微分 (PID) コントローラーを使用してモーター回転数を調整することで高度と姿勢を制御。
経路追従コントローラーと速度コントローラーを使用して上位レベルのコマンドを提供。
気象データベースに対する Python® クエリを使用して場所に固有の風条件を取得。
突風プロファイルを使用してドローン コントローラーの安定性をテスト。
MATLAB アプリで収益性分析を使用して技術とビジネスのトレードオフを確認。
Parallel Computing Toolbox™ がある場合、パラメーター スイープを使用して以下も実行できます。
荷物の質量を変更してクワッドコプターの軌跡への影響を確認。
クワッドコプターのターゲット速度を変更してクワッドコプターがターゲット経路を追従できるかどうかを確認。
クワッドコプターの本体を CAD で設計し、モデルを Simscape™ Multibody™ にインポートできます。高速シミュレーションを可能にするために、電気モーターは電力変換のダイナミクスを抽象的にキャプチャします。クワッドコプターは、最終ウェイポイントに到達してドローンが一連のリリース条件を満たすと、荷物をリリースします。この例の詳細については、次の手順に従って Web ブラウザーで開く概要を確認するか、Quadcopter Drone Model in Simscape (MATLAB Central File Exchange) を参照してください。
ファイルのダウンロード
gitclone関数を使用して、現在のフォルダーに最新のリポジトリをクローンします。
gitclone("https://github.com/mathworks/Quadcopter-Drone-Model-Simscape");あるいは、次のいずれかのオプションを選択します。次のオプションを使用して、最新のファイルと、以前のリリースの MATLAB と互換性のあるバージョンのプロジェクトをダウンロードできます。
Quadcopter Drone Model in Simscape (MATLAB Central File Exchange) からこのプロジェクトの ZIP ファイルをダウンロードします。
Quadcopter Drone Model in Simscape (GitHub) から Git™ リポジトリをクローンします。
プロジェクトを開く
gitclone 関数を使用した後、MATLAB によって現在のフォルダーに新しいフォルダーが作成されます。この例では、プロジェクトを使用してサポート ファイルを管理します。Quadcopter_Drone プロジェクト ファイルを開きます。開いているプロジェクトがある場合は、このプロジェクトを読み込む前に MATLAB によって閉じられます。モデルには何百ものサポート ファイルが含まれているため、プロジェクト環境の構成には数分かかります。最上位モデルのキャンバスにある詳細のハイパーリンクをクリックすると、モデルのサブシステムと構造の確認に役立つ概要が Web ブラウザーで開きます。この概要には、主なシミュレーション結果も示されます。
openProject("Quadcopter-Drone-Model-Simscape");プロジェクトの確認
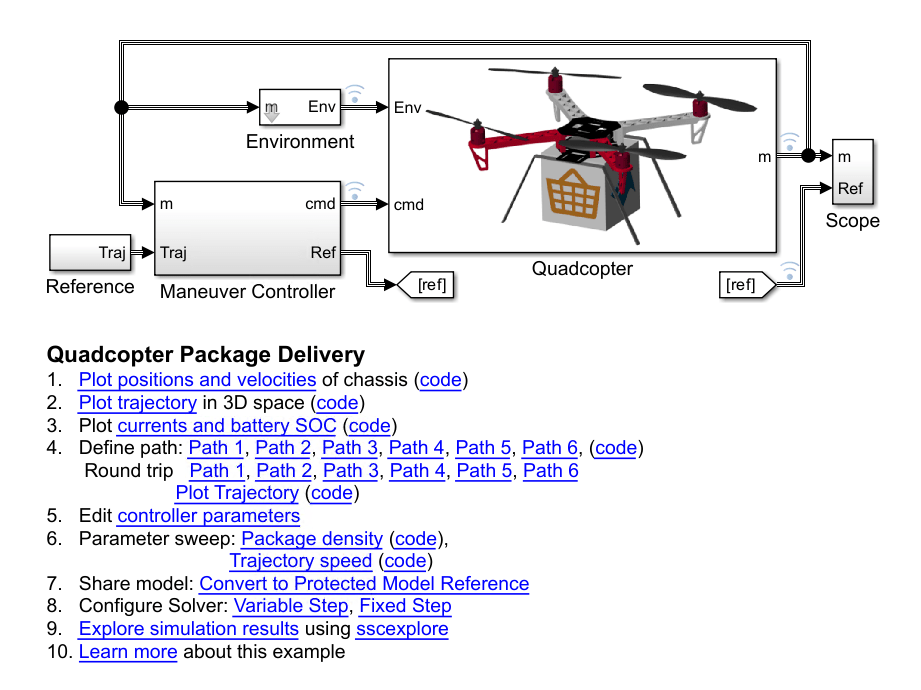
クワッドコプターと制御システム
最上位モデルは、クワッドコプターと制御システムを示しています。キャンバス上のハイパーリンクをクリックしてシャーシの位置と速度をプロットし、3 次元空間に軌跡をプロットします。バッテリーを流れる電流とバッテリーの充電状態 (SOC) もプロットできます。
クワッドコプターの機械システムと電気システム
Quadcopter サブシステムのマスクの下を調べます。このサブシステムでは、クワッドコプターの本体、プロペラ、およびクワッドコプターに作用する力をモデル化しています。

クワッドコプターのモーターとバッテリー
Quadcopter サブシステム内で、Electrical サブシステムのマスクの下を調べます。このサブシステムではモーターとバッテリーをモデル化しています。

MathWorks Simscape Team による最新の例を確認するには、MATLAB Central の MathWorks Simscape Team を参照してください。