調整された制御システムの検証
systune または制御システム調整器を使用して制御システムを調整する場合、調整の結果を検証しなければなりません。調整結果は調整目標がどの程度満たされているかを数値およびグラフィカルな方法で示します (数値的な調整結果の解釈および調整目標の可視化を参照してください)。調整されたコントローラー パラメーターを使用して、他のシステム応答を確認することがあります。Simulink® モデルを調整する場合、完全な非線形システムに対して調整されたコントローラーも検証しなければなりません。コマンド ラインおよび制御システム調整器には、調整された制御システムを検証するためのツールがいくつか用意されています。
システム応答の抽出とプロット
調整目標に対応するシステム応答に加えて (調整目標の可視化を参照)、他のシステム応答をプロットすることにより、調整されたシステムの性能を評価することもできます。たとえば、基準入力から制御される出力への伝達関数のステップ応答をプロットして、設定値追従またはオーバーシュートの性能を評価します。または、開ループ伝達関数を確認して安定余裕を評価します。解析に必要な任意の伝達関数を制御システムの調整モデルから抽出できます。
コマンド ラインでのシステム応答の抽出
調整ツールには、調整された制御システムからの応答を抽出できる解析関数が含まれています。
一般化状態空間 (genss) モデルの場合は次を使用します。
slTuner インターフェイスの場合は次を使用します。
どちらの場合も、抽出された応答は状態空間 (ss) モデルで表されます。これらのモデルを解析するには、step、bode、sigma、margin などのコマンドを使用します。
たとえば、例ヘリコプターのマルチループ制御の制御システムを調整するとします。Simulink モデルのインターフェイス ST0 のために slTuner を作成してあります。また、調整目標として TrackReq、MarginReq1、MarginReq2、PoleReq を指定済みです。systune を使用して制御システムを調整します。
AllReqs = [TrackReq,MarginReq1,MarginReq2,PoleReq]; ST1 = systune(ST0,AllReqs);
Final: Soft = 1.12, Hard = -Inf, Iterations = 72
さらに、ST0 が、theta-ref、theta、phi-ref、phi という信号を含む解析ポイントをもつと仮定します。getIOTransfer を使用して、theta-ref および phi-ref から theta および phi への調整された伝達関数を抽出します。
T1 = getIOTransfer(ST1,{'theta-ref','phi-ref'},{'theta','phi'});
step(T1,5)
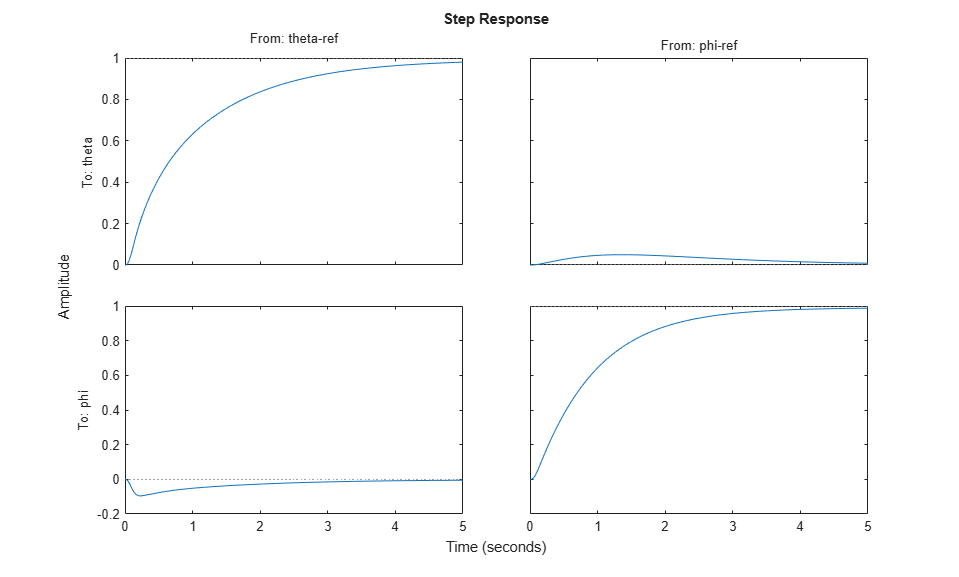
ステップ プロットは、抽出された伝達関数が、指定された参照入力から指定された出力への 2 入力 2 出力の応答であることを示します。
調整された genss モデルから応答を抽出する方法を示す例は、コマンド ラインでの調整された MATLAB モデルからの応答の抽出を参照してください。
その他の例については、結果の検証を参照してください。
制御システム調整器でのシステム応答
制御システム調整器におけるシステム応答の抽出とプロットの詳細については、制御システム調整器での応答プロットの作成を参照してください。
Simulink モデルでの設計の検証
Simulink モデルを調整する場合、ソフトウェアではモデルの線形化に対して調整目標が評価されます。同様に、getIOTransfer などの解析コマンドは、線形化されたシステム応答を抽出します。したがって、調整された線形システムがすべての設計要件を満たしている場合でも、調整されたコントローラー パラメーターで完全な非線形モデルをシミュレートして、調整されたコントローラー パラメーターを検証しなければなりません。そのためには、調整されたパラメーターの値をモデルに書き込みます。
ヒント
モデルの初期条件以外の操作点で Simulink モデルを調整する場合は、調整されたコントローラー パラメーターを検証する前に、同じ操作点でモデルを初期化します。特定の操作点での Simulink モデルのシミュレーションを参照してください。
コマンド ラインでのパラメーターの書き込み
調整された slTuner インターフェイスから対応する Simulink モデルに調整ブロックの値を書き込むには、writeBlockValue コマンドを使用します。たとえば、ST1 が、systune によって返される調整された slTuner インターフェイスであるとします。次のコマンドは、ST1 から関連する Simulink モデルに調整パラメーターを書き込みます。
writeBlockValue(ST1)
Simulink モデルをシミュレートして、調整されたパラメーター値でシステムの性能を評価します。
制御システム調整器でのパラメーターの書き込み
調整されたブロック パラメーターを Simulink モデルに書き込むには、[Control System] タブで  [ブロックの更新] をクリックします。
[ブロックの更新] をクリックします。
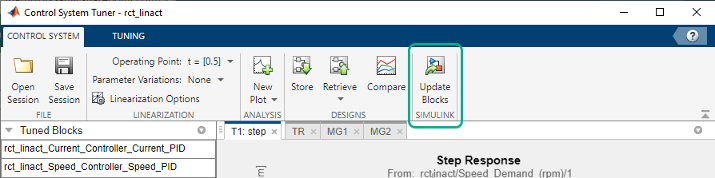
制御システム調整器で、調整されたブロック パラメーターの現在の値が Simulink モデル内の対応するブロックに転送されます。モデルをシミュレートして、調整されたパラメーター値を使ってシステムの性能を評価します。
制御システム調整器に保存されている以前の設計のパラメーター値で Simulink モデルを更新するには、 [取得] をクリックして、現在の設計に使用する保存した設計を選択します。次に、 [ブロックの更新] をクリックします。
[取得] をクリックして、現在の設計に使用する保存した設計を選択します。次に、 [ブロックの更新] をクリックします。