getSensitivity
制御システムの一般化モデルからの感度関数
説明
例
解析ポイント X でマークされるプラント入力での感度を計算します。
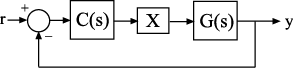
数値 LTI プラント モデル G、調整可能なコントローラー C、および AnalysisPoint ブロック X を指定し、接続することで、システムのモデルを作成します。AnalysisPoint ブロックを使用して、感度を評価する位置 (この例ではプラント入力) をマークします。
G = tf([1],[1 5]); C = tunablePID('C','p'); C.Kp.Value = 3; X = AnalysisPoint('X'); T = feedback(G*X*C,1);
T は、 から への制御システムの閉ループ応答を表す genss モデルです。このモデルには、解析ポイントを特定する AnalysisPoint ブロック X が含まれています。
X での感度 を計算します。
S = getSensitivity(T,'X');
tf(S)ans = From input "X" to output "X": s + 5 ----- s + 8 Continuous-time transfer function. Model Properties
外側のループが開いた状態で G2 の出力における内側のループの感度を計算します。
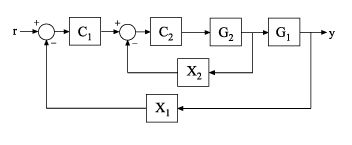
数値プラント モデル、調整可能なコントローラー、および AnalysisPoint ブロックの指定と接続を行って、システムのモデルを作成します。G1 と G2 はプラント モデル、C1 と C2 は調整可能なコントローラー、X1 と X2 はループ開始の可能な位置をマークする AnalysisPoint ブロックです。
G1 = tf(10,[1 10]); G2 = tf([1 2],[1 0.2 10]); C1 = tunablePID('C','pi'); C2 = tunableGain('G',1); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2'); T = feedback(G1*feedback(G2*C2,X2)*C1,X1);
外側のループが X1 で開いた状態で、感度 を X2 で計算します。
S = getSensitivity(T,'X2','X1'); tf(S)
ans = From input "X2" to output "X2": s^2 + 0.2 s + 10 ---------------- s^2 + 1.2 s + 12 Continuous-time transfer function. Model Properties
入力引数
出力引数
詳細
"感度関数" は単純に "感度" とも呼ばれ、加法的な外乱に対する信号の感度の度合いを測るものです。開ループ ゲインが 1 より大きくなる周波数帯域では、フィードバックにより感度が下がります。
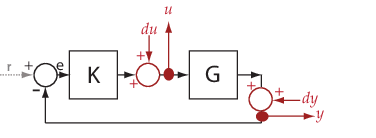
以下のモデルを考えます。
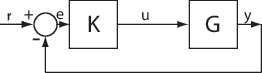
u での感度 Su は、du から u への伝達関数として定義されます。
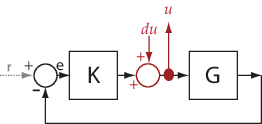
ここで、I は KG と同じサイズの単位行列です。
複数の位置、たとえば u と y での感度は、外乱から感度測定への MIMO 伝達関数として定義されます。
バージョン履歴
R2014a で導入
参考
getPoints | AnalysisPoint | genss | getLoopTransfer | systune | getIOTransfer | getCompSensitivity | getValue | getSensitivity (Simulink Control Design)