Switch
2 番目の入力の値に基づいて 1 番目の入力と 3 番目の入力の間で出力を切り替え
ライブラリ:
Simulink /
Commonly Used Blocks
Simulink /
Signal Routing
HDL Coder /
Commonly Used Blocks
HDL Coder /
Signal Routing
説明
Switch ブロックは、2 番目の入力の値に応じて、1 番目の入力または 3 番目の入力を通過させます。1 番目の入力と 3 番目の入力は "データ入力" と呼ばれます。2 番目の入力は "制御入力" と呼ばれます。[1 番目の入力が通過する条件] パラメーターと [しきい値] パラメーターを使って、ブロックが最初の入力を通過させる条件を指定します。
既知の出力データ型を 1 番目の入力端子と 3 番目の入力端子に直ちに逆伝播するには、[出力データ型] パラメーターを [継承: 内部ルールによる継承] に設定し、[すべてのデータ端子入力が同じデータ型をもつ] チェック ボックスをオンにします。
ヒント
逆伝播の [継承: 内部ルールによる継承] では、[すべてのデータ端子入力が同じデータ型をもつ] パラメーターが選択されている必要があります。そうでない場合、出力データ型が 1 番目の出力端子と 3 番目の出力端子にブロックで自動的に逆伝播されません。
データ入力に関する制限
[異なるデータの入力サイズを許可する] を選択している場合は、2 つのデータ入力のサイズが異なっていてもかまいません。ただし、このブロックでは可変サイズの入力信号はサポートされません。そのため、各入力のサイズがシミュレーション中に変わることはありません。
Switch ブロックへのデータ入力が共にバスの場合、両方のバスの要素名は同じでなければなりません。同じ要素名を使用することで、いずれの入力バスが選択されたかにかかわらず、出力バスが同じ要素名をもつようにすることができます。ユーザー モデルがこの要件を満たすようにするには、バス オブジェクトを使用してバスを定義し、[要素名の不一致] 診断に エラー を設定します。詳細については、モデル コンフィギュレーション パラメーター: 接続性の診断を参照してください。
ブロック アイコンの外観
ブロックのダイアログ ボックスを開かなくても、ブロック アイコンで [1 番目の入力が通過する条件] と [しきい値] を確認できます。
ブロックの向きに関する端子の順番の詳細については、回転または反転したブロックの端子の位置の特定を参照してください。
Boolean 制御入力に対するブロックの動作
制御入力が Boolean 信号の場合、次の条件としきい値の組み合わせのいずれかを使用してください。
u2 >= しきい値、1に等しいしきい値u2 > しきい値、0に等しいしきい値u2 ~= 0
それ以外の場合、Switch ブロックはしきい値を無視し、信号の経路指定に Boolean 入力を使用します。制御入力が 1 の場合は 1 番目の入力が渡され、制御入力が 0 の場合は 3 番目の入力が渡されます。この場合、コンパイル時の後にブロック アイコンが変わり、それぞれ T と F を使用して 1 番目の入力と 3 番目の入力にラベルが付けられます。
サポートするデータ型
制御入力は、固定小数点型と列挙型を含む Simulink® がサポートする任意のデータ型にすることができます。制御入力を複素数にすることはできません。制御入力が列挙の場合、[しきい値] パラメーターは同じ列挙型の値でなければなりません。
データ入力は、Simulink がサポートする任意のデータ型にすることができます。一方のデータ入力が列挙型の場合、もう一方も同じ列挙型でなければなりません。
出力が列挙型の場合、どちらのデータ入力も出力と同じ列挙型を使用しなければなりません。
詳細については、Simulink でサポートされているデータ型を参照してください。
例
Boolean 制御端子を使用する Switch ブロックの例
この例では、制御端子への Boolean 入力をもつ Switch ブロックを示します。

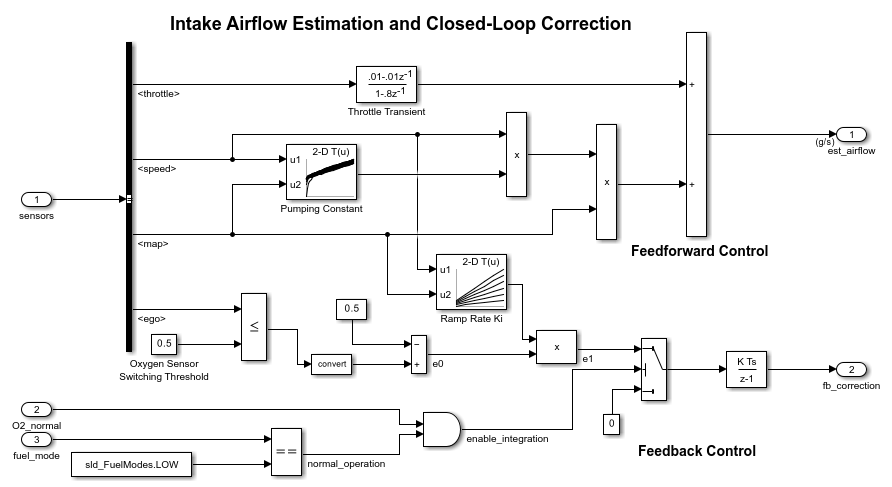
フォールトトレラント燃料制御システムのモデル化
この例では、Stateflow® と Simulink® の機能を組み合わせてハイブリッド システムをモデル化する方法を示します。このタイプのモデル化は、離散イベントに基づいて多数の可能な動作モードをもつシステムに対して特に便利です。従来の信号の流れが Simulink で処理されるのに対して、制御設定の変更は Stateflow で実装されます。この例で説明するモデルでは、ガソリン エンジンの燃料制御システムを表します。このシステムは、個々のセンサーの故障を検出し、制御システムが連続稼働用に動的に再設定されるという点で堅牢です。
正確なゼロクロッシング検出
この例では、Simulink® でのゼロクロッシング検出の仕組みを示します。Simulink では、ゼロクロッシング検出を使用して、ソルバーのタイム ステップを下げることなく、急激なモデルの変化や不連続点を正確にシミュレートします。詳細については、ゼロクロッシング検出を参照してください。
端子
入力
出力
パラメーター
メイン
ブロックが 1 番目のデータ入力を通過させる条件を選択します。制御入力が [1 番目の入力が通過する条件] パラメーターで設定された条件に一致する場合は、最初の入力が渡されます。そうでない場合、ブロックは入力 Port_3 からの 2 番目のデータ入力信号を通過させます。
-
[u2 >= しきい値] 制御入力がしきい値以上であるかどうかをチェックします。
-
[u2 > しきい値] 制御入力がしきい値よりも大きいかどうかをチェックします。
-
u2 ~= 0 制御入力がゼロ以外かどうかをチェックします。
メモ
Switch ブロックは、列挙データ型で
[u2 ~= 0]モードをサポートしていません。
ヒント
制御入力が Boolean 信号の場合、次の条件としきい値の組み合わせのいずれかを使用してください。
u2 >= しきい値、1 に等しいしきい値u2 > しきい値、0 に等しいしきい値u2 ~= 0
それ以外の場合、Switch ブロックはしきい値を無視し、信号の経路指定にブール値を使用します。値が 1 の場合、最初の入力が渡され、0 の場合は 3 番目の入力が渡されます。この動作について説明した警告メッセージも MATLAB® コマンド ウィンドウに表示されます。
プログラムでの使用
ブロック パラメーター: Criteria |
| 型: 文字ベクトル |
値: 'u2 >= Threshold' | 'u2 > Threshold' | 'u2 ~= 0' |
既定の設定: 'u2 > Threshold' |
ブロックがどちらの入力を出力に渡すかを決定する [1 番目の入力が通過する条件] で使用されるしきい値を割り当てます。[しきい値] は、[出力の最小値] より大きく、[出力の最大値] より小さくなければなりません。
非スカラーのしきい値を指定するには、大かっこを使用します。たとえば、有効なエントリは以下のようになります。
[1 4 8 12][MyColors.Red, MyColors.Blue]
依存関係
[1 番目の入力が通過する条件] を [u2 ~= 0] に設定すると、このパラメーターは無効になります。
プログラムでの使用
ブロック パラメーター: Threshold |
| 型: 文字ベクトル |
| 値: スカラー |
既定の設定: '0'
|
ゼロクロッシング検出を有効にする場合は選択します。詳細については、ゼロクロッシング検出を参照してください。
プログラムでの使用
ブロック パラメーター: ZeroCross |
| 型: 文字ベクトル | string |
値: 'off' | 'on' |
既定の設定: 'on' |
信号属性
データ属性の設定には [データ型アシスタント] が役立ちます。[データ型アシスタント] を使用するには、 をクリックします。詳細については、データ型アシスタントを利用したデータ型の指定を参照してください。
をクリックします。詳細については、データ型アシスタントを利用したデータ型の指定を参照してください。
すべてのデータ入力が同じデータ型をもつようにします。
プログラムでの使用
ブロック パラメーター: InputSameDT |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
ソフトウェアでチェックする出力範囲の下限値。
最小値を使用して以下が行われます。
一部のブロックに対するパラメーター範囲のチェック (ブロック パラメーターの最小値と最大値の指定を参照)
シミュレーション範囲のチェック (信号範囲の指定およびシミュレーション範囲のチェックの有効化を参照)
固定小数点データ型の自動スケーリング
モデルから生成するコードの最適化。この最適化により、アルゴリズム コードが削除され、SIL やエクスターナル モードなどの一部のシミュレーション モードの結果に影響を与えることがあります。詳細については、Optimize using the specified minimum and maximum values (Embedded Coder)を参照してください。
ヒント
[出力の最小値] により、実際の出力信号が飽和する (またはクリップされる) ことはありません。代わりに、Saturation ブロックを使用してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | OutMin |
| 値: | '[]' (既定値) | scalar in quotes |
ソフトウェアでチェックする出力範囲の上限値。
最大値を使用して以下が行われます。
一部のブロックに対するパラメーター範囲のチェック (ブロック パラメーターの最小値と最大値の指定を参照)
シミュレーション範囲のチェック (信号範囲の指定およびシミュレーション範囲のチェックの有効化を参照)
固定小数点データ型の自動スケーリング
モデルから生成するコードの最適化。この最適化により、アルゴリズム コードが削除され、SIL やエクスターナル モードなどの一部のシミュレーション モードの結果に影響を与えることがあります。詳細については、Optimize using the specified minimum and maximum values (Embedded Coder)を参照してください。
ヒント
[出力の最大値] により、実際の出力信号が飽和する (またはクリップされる) ことはありません。代わりに、Saturation ブロックを使用してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | OutMax |
| 値: | '[]' (既定値) | scalar in quotes |
出力データ型を指定します。
- 継承: MSB を保持
演算の全範囲を維持するデータ型を選択してから、組み込みターゲット ハードウェアに適したサイズに出力精度が下げられます。
このルールでは、オーバーフローは決して発生しません。
- 継承: LSB を保持
演算の精度を維持するデータ型を選択しますが、全範囲の型が組み込みターゲット ハードウェアに適合しない場合、その範囲を削減します。このルールでは、オーバーフローが発生することがあります。
組み込みターゲット ハードウェアの設定を変更すると、これらの内部ルールにより選択されるデータ型が変更される可能性があります。コードの効率と数値の精度が、ソフトウェアにより同時に最適化されるとは限りません。ルールが数値精度またはパフォーマンスに対する要求を満たさない場合は、以下のいずれかを行ってください。
出力データ型を明示的に指定する。
単に
継承: 1 番目の入力と同じを選択します。fixdt(1,32,16)のように既定のデータ型を明示的に指定し、固定小数点ツールを使用してモデルにデータ型を推奨する。詳細については、fxptdlg(Fixed-Point Designer) を参照してください。独自の継承ルールを指定するには、
[継承: 逆伝播による継承]を使用し、Data Type Propagation ブロックを使用します。このブロックの使い方の例については、Signal Attributes ライブラリの Data Type Propagation Examples ブロックを参照してください。
-
継承: 内部ルールによる継承 出力データ型は次のルールを使用して決定されます。
最初の入力端子のデータ型 出力データ型 3 つ目の入力端子より大きい正の範囲をもつ 最初の入力端子から継承します 3 つ目の入力端子と同じ正の範囲をもつ 3 つ目の入力端子から継承します 3 つ目の入力端子より小さい正の範囲をもつ ブール値であり、3 つ目の入力端子が uint8であるuint8であり、3 つ目の入力端子がブール値であるブール値であり、他は int8であるブール値に設定されます uint8であり、他はブール値である2 つの入力端子のデータ型 出力データ型 一方の入力の型がブール値で、もう一方が uint8である3 つ目のデータ端子のデータ型に設定されます 一方の入力がブール値で、もう一方が int8であるブール値に設定されます -
継承: 逆伝播による継承 出力ブロックからデータ型が採用されます。
-
継承: 1 番目の入力と同じ 1 番目のデータ入力端子のデータ型を使用します。
-
double 出力データ型が
doubleになるように指定します。-
single 出力データ型が
singleになるように指定します。-
half 出力データ型が
halfになるように指定します。-
int8 出力データ型が
int8になるように指定します。-
uint8 出力データ型が
uint8になるように指定します。-
int16 出力データ型が
int16になるように指定します。-
uint16 出力データ型が
uint16になるように指定します。-
int32 出力データ型が
int32になるように指定します。-
uint32 出力データ型が
uint32になるように指定します。-
int64 出力データ型が
int64になるように指定します。-
uint64 出力データ型が
uint64になるように指定します。-
fixdt(1,16,0) 出力データ型が固定小数点
fixdt(1,16,0)になるように指定します。-
fixdt(1,16,2^0,0) 出力データ型が固定小数点
fixdt(1,16,2^0,0)になるように指定します。-
Enum:<class name> 列挙データ型を使用します。たとえば、
Enum: BasicColorsなどです。-
Simulink.ImageType(480,640,3) Computer Vision Toolbox™ がある場合は
Simulink.ImageType(Computer Vision Toolbox) オブジェクトを使用します。-
string 出力データ型が string になるように指定します。
-
<data type expression> データ型オブジェクトを使用します。たとえば、
Simulink.NumericTypeなどです。
ヒント
出力が列挙型の場合、どちらのデータ入力も出力と同じ列挙型を使用しなければなりません。
プログラムでの使用
ブロック パラメーター: OutDataTypeStr |
| 型: 文字ベクトル |
値: 'Inherit: Inherit via internal rule | 'Inherit: Inherit via back propagation' | 'Inherit: Same as first input' | 'double' | 'single' | 'half' | 'int8' | 'uint8' | 'int16' | 'uint16', 'int32' | 'uint32' | 'int64' | 'uint64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | 'fixdt(1,16,2^0,0)' | Enum: <class name> | Simulink.ImageType(480,640,3) | 'string' | '<data type expression>' |
既定の設定: 'Inherit: Inherit via internal rule' |
このパラメーターを選択して、このブロックについて指定したデータ型を固定小数点ツールがオーバーライドするのを防止します。詳細については、出力データ型設定のロック (Fixed-Point Designer)を参照してください。
プログラムでの使用
ブロック パラメーター: LockScale |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
次のいずれかの丸めモードを選択します。
正方向正の無限大方向に正負の値を丸めます。MATLAB 関数
ceilと等価です。最も近い偶数方向最も近い表現可能な値に数値を丸めます。同順位が発生した場合は、最も近い偶数の整数に丸めます。Fixed-Point Designer™ 関数
convergentと等価です。負方向負の無限大方向に正負の値を丸めます。MATLAB 関数
floorと等価です。最も近い正の整数方向最も近い表現可能な値に数値を丸めます。同順位が発生した場合は、正の無限大方向に丸めます。Fixed-Point Designer 関数
nearestと等価です。最も近い整数方向最も近い表現可能な値に数値を丸めます。同順位が発生した場合は、正の数値を正の無限大方向、負の数値を負の無限大方向に丸めます。Fixed-Point Designer 関数
roundと等価です。最も簡潔下限値への丸めとゼロへの丸めのいずれかを自動的に選択し、できるだけ効率の高い丸めコードを生成します。
ゼロ方向ゼロ方向に数値を丸めます。MATLAB 関数
fixと等価です。
プログラムでの使用
ブロック パラメーター: RndMeth |
| 型: 文字ベクトル |
値: 'Ceiling' | 'Convergent' | 'Floor' | 'Nearest' | 'Round' | 'Simplest' | 'Zero' |
既定の設定: 'Floor' |
参考
詳細については、丸めモード (Fixed-Point Designer)を参照してください。
オーバーフローで飽和するかラップするかを指定します。
on— オーバーフローは、データ型が表現できる最小値または最大値のいずれかに飽和します。off— オーバーフローは、データ型によって表現される適切な値にラップされます。
たとえば、符号付き 8 ビット整数 int8 で表現できる最大値は 127 です。この最大値を超えるブロックの演算結果により 8 ビット整数のオーバーフローが発生します。
このパラメーターがオンになっていると、ブロック出力は 127 で飽和します。同様に、ブロック出力は最小出力値である -128 で飽和します。
このパラメーターをオフにすると、オーバーフローを引き起こした値は
int8として解釈され、意図しない結果が引き起こされる可能性があります。たとえば、int8として表されるブロック結果 130 (バイナリで 1000 0010) は -126 です。
ヒント
モデルでオーバーフローが発生する可能性があり、生成コードに飽和保護を明示的に組み込む必要があるときには、このパラメーターをオンにすることを検討してください。
生成コードの効率を最適化する場合には、このパラメーターをオフにすることを検討してください。このパラメーターをオフにすると、ブロックが範囲外の信号を処理する方法を指定しすぎないようにする点でも役立ちます。詳細については、信号範囲のエラーのトラブルシューティングを参照してください。
このパラメーターをオンにすると、飽和は出力や結果だけでなく、このブロックの内部演算すべてに適用されます。
通常、オーバーフローが可能ではない場合は、コード生成プロセスで検出されます。この場合、コード ジェネレーターでは飽和コードは生成されません。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | SaturateOnIntegerOverflow |
| 値: | 'off' (既定値) | 'on' |
異なるサイズの入力信号を許可するには、このチェック ボックスをオンにします。ブロックは、入力信号サイズを出力信号に伝播します。2 つのデータ入力が可変サイズ信号の場合、信号の最大サイズは等しくても、異なってもかまいません。
プログラムでの使用
ブロック パラメーター: AllowDiffInputSizes
|
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定の設定: 'off'
|
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|