Gain
入力に定数を乗算
ライブラリ:
Simulink /
Commonly Used Blocks
Simulink /
Math Operations
HDL Coder /
Commonly Used Blocks
HDL Coder /
HDL Floating Point Operations
HDL Coder /
Math Operations
説明
Gain ブロックは、入力に定数値 (ゲイン) を乗算します。入力とゲインには、スカラー、ベクトル、または行列を指定できます。
ゲインの値は [ゲイン] パラメーターで指定します。[乗算] パラメーターによって、要素ごとの乗算または行列乗算を指定することができます。行列乗算の場合、このパラメーターによって乗算の順序も指定できます。
ゲインは、double から、ブロックのパラメーター属性のデータ型アシスタントで指定されたデータ型に、最近傍の丸めと飽和を使用して変換されます。次に、入力とゲインが乗算され、結果は、指定された丸めとオーバーフロー モードを使用して出力データ型に変換されます。
例
SimpleGain という名前のモデルを開いてシミュレートします。
mdl = "SimpleGain";
open_system(mdl)
sim(mdl);
このモデルは次の方程式を表しています。
Constant ブロックから Gain ブロックに定数値 2 が提供されます。
Gain ブロックは入力に 5 を乗算します。
Display ブロックに乗算の結果が表示されます。
拡張例

跳ねるボールのシミュレーション
この例では、跳ねるボールの 2 つのモデルを使用して、Zeno 動作があるハイブリッド動的システムをモデル化する異なるアプローチを示します。Zeno 動作の簡略的な特徴として、特定の複合システムに対して一定の時間間隔で無限個のイベントが発生することが挙げられます。ボールがエネルギーを失うにつれ、連続したより短い時間間隔で地面と衝突するようになります。
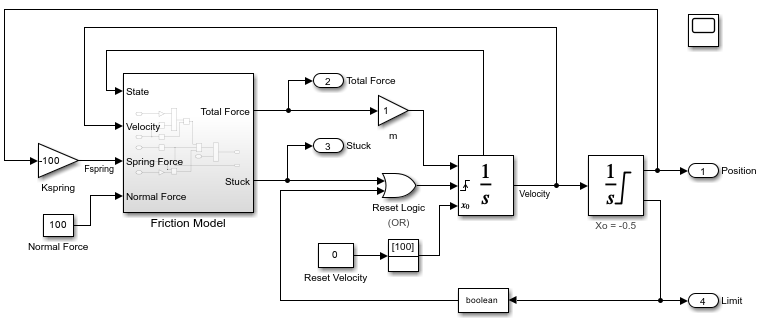
マス-バネ-ダンパー系におけるスティックスリップ摩擦とハード ストップのモデル化
この例では、ハード ストップとスティックスリップ動作による摩擦の変化をマス-バネ-ダンパー モデルに組み込む 1 つの方法を示します。

閉ループ制御を使ったエンジン タイミング モデル
この例では、Triggered Subsystem を使用したエンジン タイミングのモデル化で説明されている開ループ エンジン モデルの閉ループ制御アルゴリズムを開発して実装する方法を示します。この例のモデル sldemo_enginewc には、負荷トルクの変化の影響が最小限に抑えられるように、高速スロットル アクチュエータを使用してエンジン速度を調節するコントローラーが含まれています。このコントローラーは離散 PI コントローラーを使って実装されます。
端子
入力
出力
パラメーター
ブロック パラメーターを対話的に編集するには、プロパティ インスペクターを使用します。Simulink® ツールストリップから、[シミュレーション] タブの [準備] ギャラリーで [プロパティ インスペクター] を選択します。
メイン
入力に乗算する値を指定します。ゲインは実数値または複素数値のスカラー、ベクトル、行列のいずれかになります。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | Gain |
| 値: | '1' (既定値) | real or complex-valued scalar, vector, or matrix in quotes |
次のいずれかの乗算モードを指定します。
要素単位 (K.*u)— 入力の各要素にゲインの各要素を乗算します。必要に応じてブロックは拡張を行い、入力とゲインを同じ次元にします。行列 (K*u)— 入力とゲインは、入力を 2 番目のオペランドとして行列乗算されます。行列 (u*K)— 入力とゲインは、入力を 1 番目のオペランドとして行列乗算されます。行列 (K*u) (u はベクトル)— 入力とゲインは、入力を 2 番目のオペランドとして行列乗算されます。このモードは[行列 (K*u)]と同じですが、次元の決め方が異なります。Kが m 行 n 列の行列であるとします。[行列 (K*u) (u はベクトル)]は、入力を長さnのベクトルに設定し、出力を長さmのベクトルに設定します。それに対して、[行列 (K*u)]は伝播を使用して入力と出力の次元を決定します。m 行 n 列のゲイン行列の場合、入力は n 行 q 列の行列に伝播でき、出力は m 行 q 列の行列になります。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | Multiplication |
| 値: | 'Element-wise(K.*u)' (既定値) | 'Matrix(K*u)' | 'Matrix(u*K)' | 'Matrix(K*u) (u vector)' |
サンプルの時間間隔を指定します。サンプル時間を継承するには、このパラメーターを -1 に設定します。詳細については、サンプル時間の指定を参照してください。
依存関係
このパラメーターは、-1 以外の値に設定した場合にのみ表示されます。詳細は、サンプル時間が推奨されないブロックを参照してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | SampleTime |
| 値: | "-1" (既定値) | scalar or vector in quotes |
信号属性
ソフトウェアでチェックする出力範囲の下限値。
最小値を使用して以下が行われます。
一部のブロックに対するパラメーター範囲のチェック (ブロック パラメーターの最小値と最大値の指定を参照)
シミュレーション範囲のチェック (信号範囲の指定およびシミュレーション範囲のチェックの有効化を参照)
固定小数点データ型の自動スケーリング
モデルから生成するコードの最適化。この最適化により、アルゴリズム コードが削除され、SIL やエクスターナル モードなどの一部のシミュレーション モードの結果に影響を与えることがあります。詳細については、Optimize using the specified minimum and maximum values (Embedded Coder)を参照してください。
ヒント
[出力の最小値] により、実際の出力信号が飽和する (またはクリップされる) ことはありません。代わりに、Saturation ブロックを使用してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | OutMin |
| 値: | '[]' (既定値) | scalar in quotes |
ソフトウェアでチェックする出力範囲の上限値。
最大値を使用して以下が行われます。
一部のブロックに対するパラメーター範囲のチェック (ブロック パラメーターの最小値と最大値の指定を参照)
シミュレーション範囲のチェック (信号範囲の指定およびシミュレーション範囲のチェックの有効化を参照)
固定小数点データ型の自動スケーリング
モデルから生成するコードの最適化。この最適化により、アルゴリズム コードが削除され、SIL やエクスターナル モードなどの一部のシミュレーション モードの結果に影響を与えることがあります。詳細については、Optimize using the specified minimum and maximum values (Embedded Coder)を参照してください。
ヒント
[出力の最大値] により、実際の出力信号が飽和する (またはクリップされる) ことはありません。代わりに、Saturation ブロックを使用してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | OutMax |
| 値: | '[]' (既定値) | scalar in quotes |
出力のデータ型を選択します。型は継承されるか、直接指定されるか、Simulink.NumericType などのデータ型オブジェクトとして表現されます。
継承オプションを選択すると、ブロックは次の動作を示します。
継承: 内部ルールによる継承— 組み込みターゲット ハードウェアのプロパティを考慮しつつ、数値の精度、パフォーマンス、および生成コードのサイズのバランスが取れるようにデータ型が選択されます。組み込みターゲット ハードウェアの設定を変更すると、内部ルールにより選択されるデータ型が変更される可能性があります。たとえば、ブロックがint8型の入力にint16のゲインを乗算し、ターゲット ハードウェア タイプとして[ASIC/FPGA]が指定されている場合、出力データ型はsfix24です。ターゲット ハードウェアとして[Unspecified (assume 32-bit Generic)](汎用 32 ビット マイクロプロセッサ) が指定された場合、出力データ型はint32です。ターゲット マイクロプロセッサによって指定される語長では出力範囲に対応できない場合、診断ビューアーにエラーが表示されます。継承: MSB を保持– 演算の全範囲を維持するデータ型を選択してから、組み込みターゲット ハードウェアに適したサイズに出力精度が下げられます。ヒント
生成コードの効率を向上させるには、[整数オーバーフローで飽和] をオフにします。
このルールでは、オーバーフローは決して発生しません。
継承: スケーリングの一致– スケーリングが入力型のスケーリングと一致するデータ型が選択されます。型の全範囲が組み込みターゲット ハードウェアに適合しない場合は、その範囲を小さくして組み込みターゲット ハードウェアに適切な型が生成されます。このルールでは、オーバーフローが発生することがあります。コードの効率と数値の精度が、ソフトウェアにより同時に最適化されるとは限りません。これらの内部ルールが、数値精度またはパフォーマンスに対する特定の要求を満たさない場合は、以下のいずれかを行ってください。
出力データ型を明示的に指定する。
単に
[継承: 入力と同じ]を選択します。fixdt(1,32,16)のように既定のデータ型を明示的に指定し、固定小数点ツールを使用してモデルにデータ型を推奨する。詳細については、fxptdlg(Fixed-Point Designer) を参照してください。独自の継承ルールを指定するには、
[継承: 逆伝播による継承]を使用し、Data Type Propagation ブロックを使用します。このブロックの使い方の例については、Signal Attributes ライブラリの Data Type Propagation Examples ブロックを参照してください。
継承: 逆伝播による継承— 駆動ブロックのデータ型を使用します。継承: 入力と同じ— 入力信号のデータ型を使用します。
依存関係
入力が単精度より小さい浮動小数点データ型の場合、
[継承: 内部ルールによる継承]の出力データ型は [単精度より小さい浮動小数点の出力型を継承する] コンフィギュレーション パラメーターの設定によって変わります。データ型の符合化に必要なビット数が単精度データ型の符合化に必要な 32 ビットより少ない場合、データ型は単精度より小さくなります。たとえば、halfとint16は単精度より小さくなります。[継承: MSB を保持]、[継承: LSB を保持]、または[継承: スケーリングの一致]を使用しながら固定小数点データ型を選択した場合、Fixed-Point Designer™ ライセンスがチェックアウトされます。内部ルールを組み合わせて使用した場合も、固定小数点型が生じることがあります。[継承: 内部ルールによる継承]を使用する場合に、固定小数点型を選択する Gain ブロックのインスタンスを最小限にするには、[GainParamInheritBuiltInType] パラメーターを 'on' に設定します。詳細については、Gain parameters inherit a built-in integer type that is losslessを参照してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | OutDataTypeStr |
| 値: | 'Inherit: Inherit via internal rule' (既定値) | 'Inherit: Keep MSB' | 'Inherit: Match scaling' | 'Inherit: Inherit via back propagation' | 'Inherit: Same as input' | 'double' | 'single' | 'half' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64' | 'uint64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | 'fixdt(1,16,2^0,0)' | '<data type expression>' |
固定小数点ツールが、ブロックに指定した [出力] データ型をオーバーライドしないようにするには、このパラメーターを選択します。詳細については、[出力データ型の設定をロックする] の使用 (Fixed-Point Designer)を参照してください。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | LockScale |
| 値: | 'off' (既定値) | 'on' |
固定小数点演算の丸めモードを指定します。詳細については、丸めモード (Fixed-Point Designer)を参照してください。
ブロック パラメーターは常に最近傍の表現可能な値に丸められます。ブロックパラメーターの丸めを直接制御するには、MATLAB® の丸め関数を使用する式をマスク フィールドに入力します。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | RndMeth |
| 値: | 'Floor' (既定値) | 'Ceiling' | 'Convergent' | 'Nearest' | 'Round' | 'Simplest' | 'Zero' |
オーバーフローで飽和するかラップするかを指定します。
on— オーバーフローは、データ型が表現できる最小値または最大値のいずれかに飽和します。off— オーバーフローは、データ型によって表現される適切な値にラップされます。
たとえば、符号付き 8 ビット整数 int8 で表現できる最大値は 127 です。この最大値を超えるブロックの演算結果により 8 ビット整数のオーバーフローが発生します。
このパラメーターがオンになっていると、ブロック出力は 127 で飽和します。同様に、ブロック出力は最小出力値である -128 で飽和します。
このパラメーターをオフにすると、オーバーフローを引き起こした値は
int8として解釈され、意図しない結果が引き起こされる可能性があります。たとえば、int8として表されるブロック結果 130 (バイナリで 1000 0010) は -126 です。
ヒント
モデルでオーバーフローが発生する可能性があり、生成コードに飽和保護を明示的に組み込む必要があるときには、このパラメーターをオンにすることを検討してください。
生成コードの効率を最適化する場合には、このパラメーターをオフにすることを検討してください。このパラメーターをオフにすると、ブロックが範囲外の信号を処理する方法を指定しすぎないようにする点でも役立ちます。詳細については、信号範囲のエラーのトラブルシューティングを参照してください。
このパラメーターをオンにすると、飽和は出力や結果だけでなく、このブロックの内部演算すべてに適用されます。
通常、オーバーフローが可能ではない場合は、コード生成プロセスで検出されます。この場合、コード ジェネレーターでは飽和コードは生成されません。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | SaturateOnIntegerOverflow |
| 値: | 'off' (既定値) | 'on' |
指定するデータのカテゴリを選択します。
継承— データ型の規則の継承。[継承]を選択すると、右側から 2 番目のメニュー/テキスト ボックスが有効になり、そこで継承モードを選択できます。組み込み— 組み込みデータ型を指定します。[組み込み]を選択すると、右側から 2 番目のメニュー/テキスト ボックスが有効になり、そこで組み込みデータ型を選択できます。固定小数点— 固定小数点データ型。[固定小数点]を選択すると、固定小数点データ型を指定するために使用できる追加のパラメーターが有効になります。式— 評価結果がデータ型となる式。[式]を選択すると、右側から 2 番目のメニュー/テキスト ボックスが有効になります。そこに式を入力することができます。
詳細については、データ型アシスタントを利用したデータ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[データ型アシスタントを表示] ボタン  をクリックします。
をクリックします。
この信号のデータ型オーバーライド モードを選択します。
[継承]を選択すると、Simulink はコンテキストからデータ型オーバーライド設定を継承します。コンテキストとはブロックのことで、信号を使用している Simulink のSimulink.Signalオブジェクトまたは Stateflow® チャートです。[オフ]を選択すると、Simulink はコンテキストのデータ型オーバーライド設定を無視し、信号に対して指定された固定小数点データ型を使用します。
詳細については、Simulink ドキュメンテーションのデータ型アシスタントを利用したデータ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[モード] を [組み込み] または [固定小数点] に設定します。
ヒント
個々のデータ型に対してデータ型オーバーライドをオフにする機能により、データ型オーバーライドを適用する際に、モデル内のデータ型をさらに効果的に制御できます。たとえば、このオプションを使用すると、データ型オーバーライド設定にかかわらず、データ型が下流ブロックの要件を満たすことを確認できます。
固定小数点データが符号付きであるか符号なしであるかを指定します。符号付きデータでは正の値と負の値を表現できますが、符号なしデータでは正の値のみを表現できます。
[符号付き]。符号付き固定小数点データを指定します。[符号なし]。符号なし固定小数点データを指定します。
詳細については、データ型アシスタントを利用したデータ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[モード] を [Fixed point] に設定します。
量子化された整数をもつ語のビット サイズを指定します。詳細については、固定小数点データ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[モード] を [固定小数点] に設定します。
オーバーフローを避け、量子化誤差を最小限に抑えるための固定小数点データのスケーリング方法を指定します。詳細については、固定小数点データ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[モード] を [固定小数点] に設定します。
固定小数点データ型の傾きを指定します。詳細については、固定小数点データ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[スケーリング] を [傾きとバイアス] に設定します。
固定小数点データ型のバイアスを任意の実数として指定します。詳細については、固定小数点データ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[スケーリング] を [傾きとバイアス] に設定します。
固定小数点データ型の小数部の長さを正または負の整数として指定します。詳細については、固定小数点データ型の指定を参照してください。
依存関係
このパラメーターを有効にするには、[スケーリング] を [2 進小数点] に設定します。
パラメーター属性
ゲインの最小値を指定します。既定値は [] (指定なし) です。ソフトウェアは、以下を行う際にこの値を使用します。
パラメーター範囲のチェック (ブロック パラメーターの最小値と最大値の指定を参照)
固定小数点データ型の自動スケーリング
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | ParamMin |
| 値: | '[]' (既定値) | scalar in quotes |
ゲインの最大値を指定します。既定値は [] (指定なし) です。ソフトウェアは、以下を行う際にこの値を使用します。
パラメーター範囲のチェック (ブロック パラメーターの最小値と最大値の指定を参照)
固定小数点データ型の自動スケーリング
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | ParamMax |
| 値: | '[]' (既定値) | scalar in quotes |
[ゲイン] パラメーターのデータ型を指定します。
[パラメーターのデータ型] を [継承: 内部ルールによる継承] に設定すると、Gain ブロックは、現在のゲイン値を参照して、現在のゲイン値を表す完全精度のデータ型を提供する内部の経験則に基づいてデータ型を選択できます。ブロック線図を更新すると、高精度で範囲の損失のないゲイン値 3 に適したデータ型が推定されます。たとえば、この経験則では、指定したゲイン値が 3 の場合、Gain ブロックは sfix32_En29 の選択したデータ型を推定します。その結果、推定されたこのデータ型は 4 を超える値を保持できません。シミュレーション時にゲイン値を 6 に調整すると、選択したデータ型でオーバーフローが発生し、動作は想定外です。
この [パラメーターのデータ型] 設定を使用してパラメーターを調整する際に、[パラメーターの最小値] と [パラメーターの最大値] パラメーターを指定します。これらの設定はシミュレーション時に必要な値の範囲についてソフトウェアに指示し、ソフトウェアが指定範囲内でゲイン値を安全に調整できる十分な範囲の完全精度のデータ型を提供できるようにします。
プログラムでの使用
ブロック パラメーターの値をプログラムで設定するには、関数 set_param を使用します。
| パラメーター: | ParamDataTypeStr |
| 値: | 'Inherit: Inherit via internal rule' (既定値) | 'Inherit: Same as input' | 'Inherit: Inherit from 'Gain'' | 'double' | 'single' | 'half' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64' | 'uint64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | 'fixdt(1,16,2^0,0)' | '<data type expression>' |
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|