Get Jacobian
ロボット コンフィギュレーションの幾何学的ヤコビアン
ライブラリ:
Robotics System Toolbox /
Manipulator Algorithms
説明
Get Jacobian ブロックは、rigidBodyTree ロボット モデルの与えられたコンフィギュレーションにおける指定されたエンドエフェクタのベースを基準とする、幾何学的ヤコビアンを返します。
ヤコビアンは、ジョイント空間の速度を、ベース座標系を基準とするエンドエフェクタの速度にマッピングします。エンドエフェクタの速度は以下と等価です。
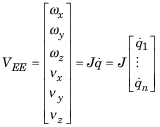
ω は角速度、υ は線形速度、 はジョイント空間の速度です。
はジョイント空間の速度です。
例
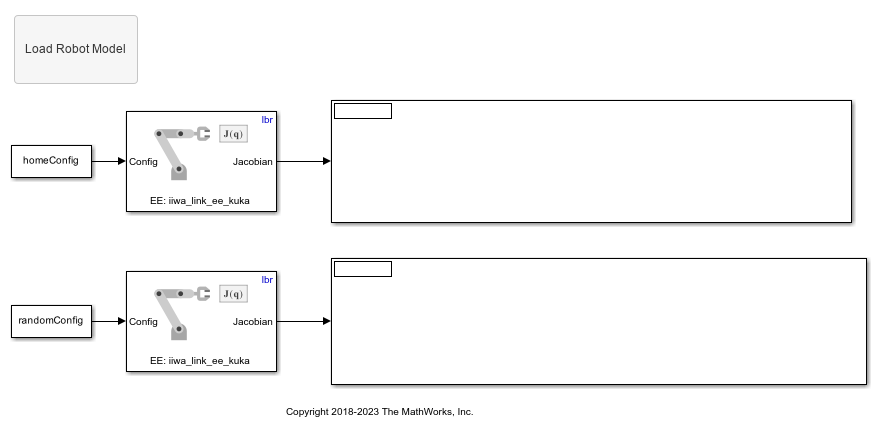
Simulink でのマニピュレーターの幾何学的ヤコビアンの計算
Simulink® でマニピュレーター アルゴリズム ブロックに渡される剛体ツリー ロボット モデルを使用してロボット マニピュレーターの幾何学的ヤコビアンを計算する。
端子
入力
出力
指定されたコンフィギュレーション [Config] をもつエンドエフェクタの幾何学的ヤコビアン。6 行 n 列の行列として返されます。ここで n は、エンドエフェクタの自由度の数です。ヤコビアンは、ジョイント空間の速度を、ベース座標系を基準とするエンドエフェクタの速度にマッピングします。エンドエフェクタの速度は以下と等価です。
ω は角速度、υ は線形速度、 はジョイント空間の速度です。
パラメーター
拡張機能
バージョン履歴
R2018a で導入