Velocity Product Torque
速度によって誘発される力を打ち消すジョイント トルク

ライブラリ:
Robotics System Toolbox /
Manipulator Algorithms
説明
Velocity Product Torque ブロックは、指定されたロボット コンフィギュレーション (ジョイント位置) に対して速度によって誘発される力を打ち消すトルクを返し、[剛体ツリー] ロボット モデルに対してジョイント速度を返します。
例
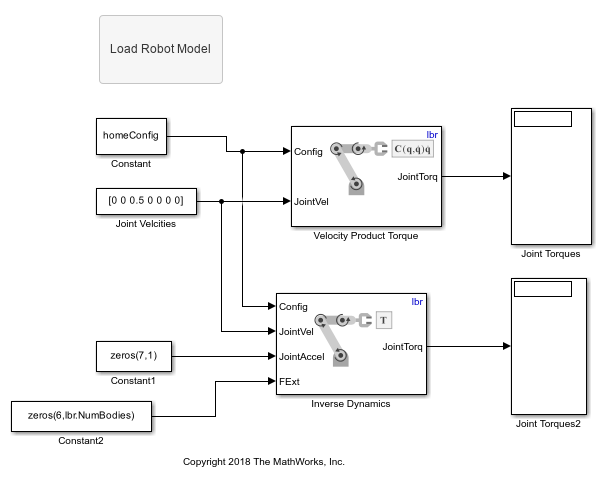
Simulink でのマニピュレーターの速度積の計算
Simulink® のマニピュレーター アルゴリズム ブロックを使用して、マニピュレーターの速度によって誘発されるトルクを計算する。
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2018a で導入