Simulink でのマニピュレーターの速度積の計算
この例では、rigidBodyTreeモデルを使用してロボット マニピュレーターの速度によって誘発されるトルクを計算する方法を示します。この例では、MATLAB® でロボット モデルおよびロボット コンフィギュレーションを定義し、それらを Simulink® に渡してマニピュレーター アルゴリズム ブロックとともに使用します。
KUKA LBR ロボットをモデル化する RigidBodyTree オブジェクトを読み込みます。関数 homeConfiguration を使用して、ロボットのホーム コンフィギュレーションまたはホーム ジョイント位置を取得します。
load('exampleLBR.mat','lbr') lbr.DataFormat = 'column'; homeConfig = homeConfiguration(lbr);
モデルを開きます。必要に応じて、[ロボット モデルの読み込み] コールバック ボタンを使用して、ロボット モデルおよびコンフィギュレーション ベクトルを再度読み込みます。
open_system('velocity_product_example.slx')
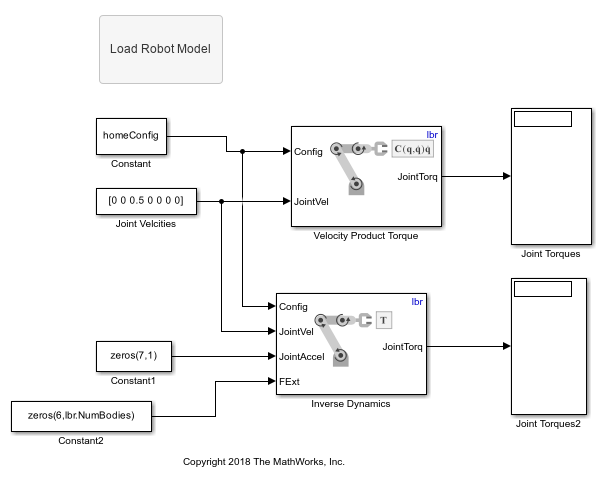
モデルを実行します。Velocity Product ブロックは、指定された速度によって生じるトルクを計算します。加速度や外力を加えずに同じ速度を Inverse Dynamics ブロックに渡して、これらの値を検証します。